手动飞行¶
Warning
本实验室出厂的飞机都是校准正确的,如果您拿到的是到手的飞机,可以略过前三点.直接看第四点手动飞行.
1.前提准备¶
b.固件的下载¶
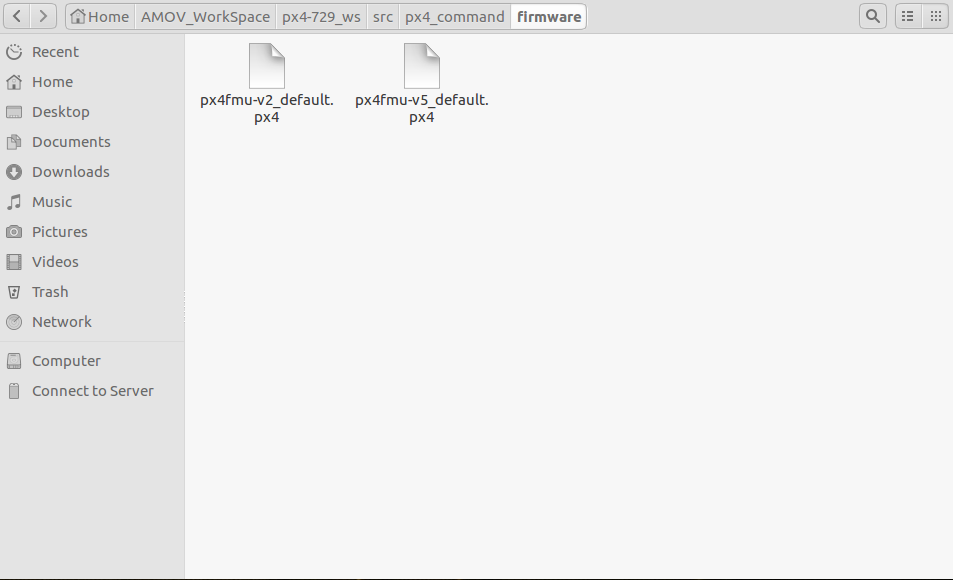
可选择下载的固件有v2和v5版本。可以到我们的github的px4_command仓库中,进入firmware文件夹下载。 下载链接:https://github.com/amov-lab/px4_command/tree/master/firmware
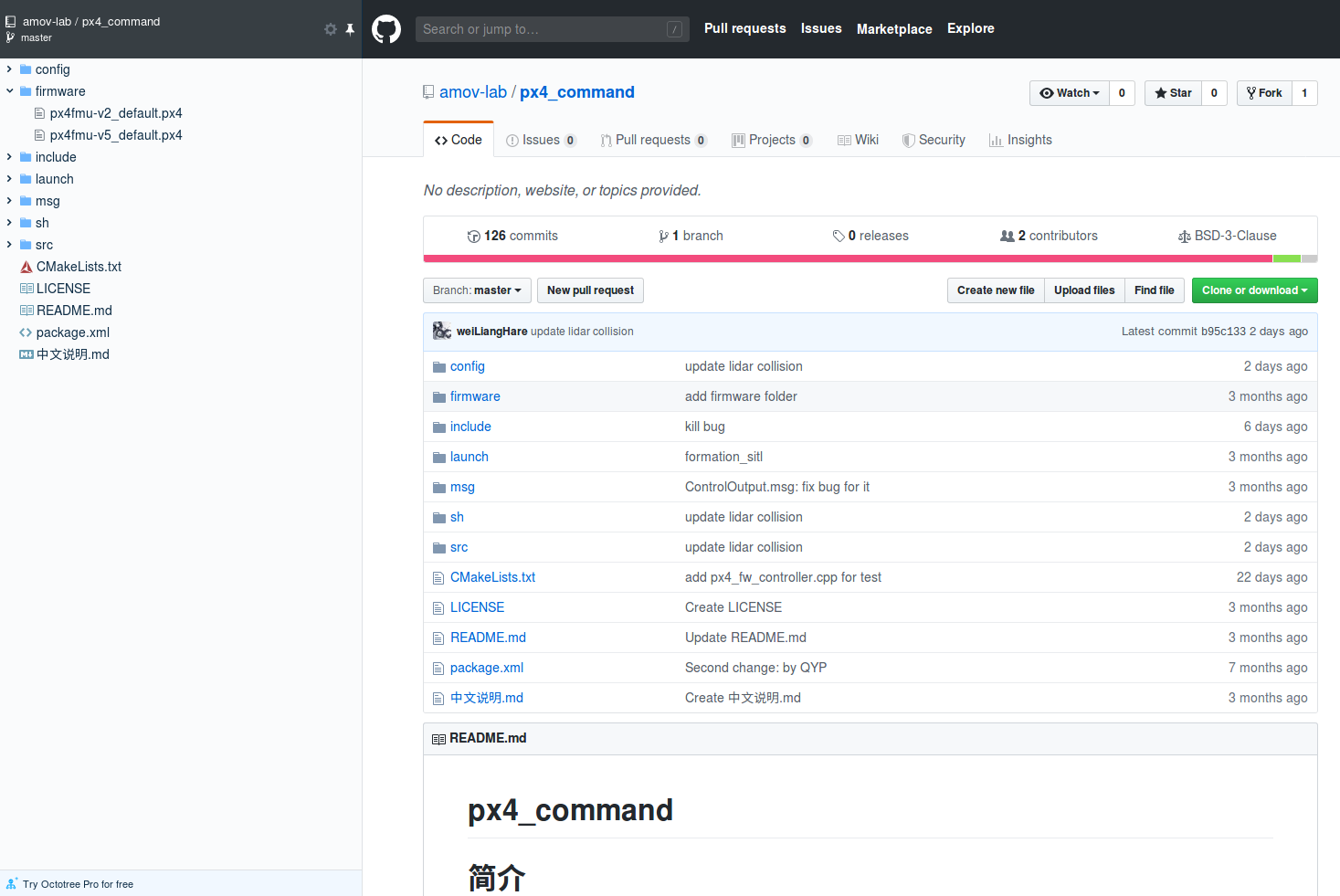
直接下载到本地就可以烧写了。
c.遥控器与接收机使用¶
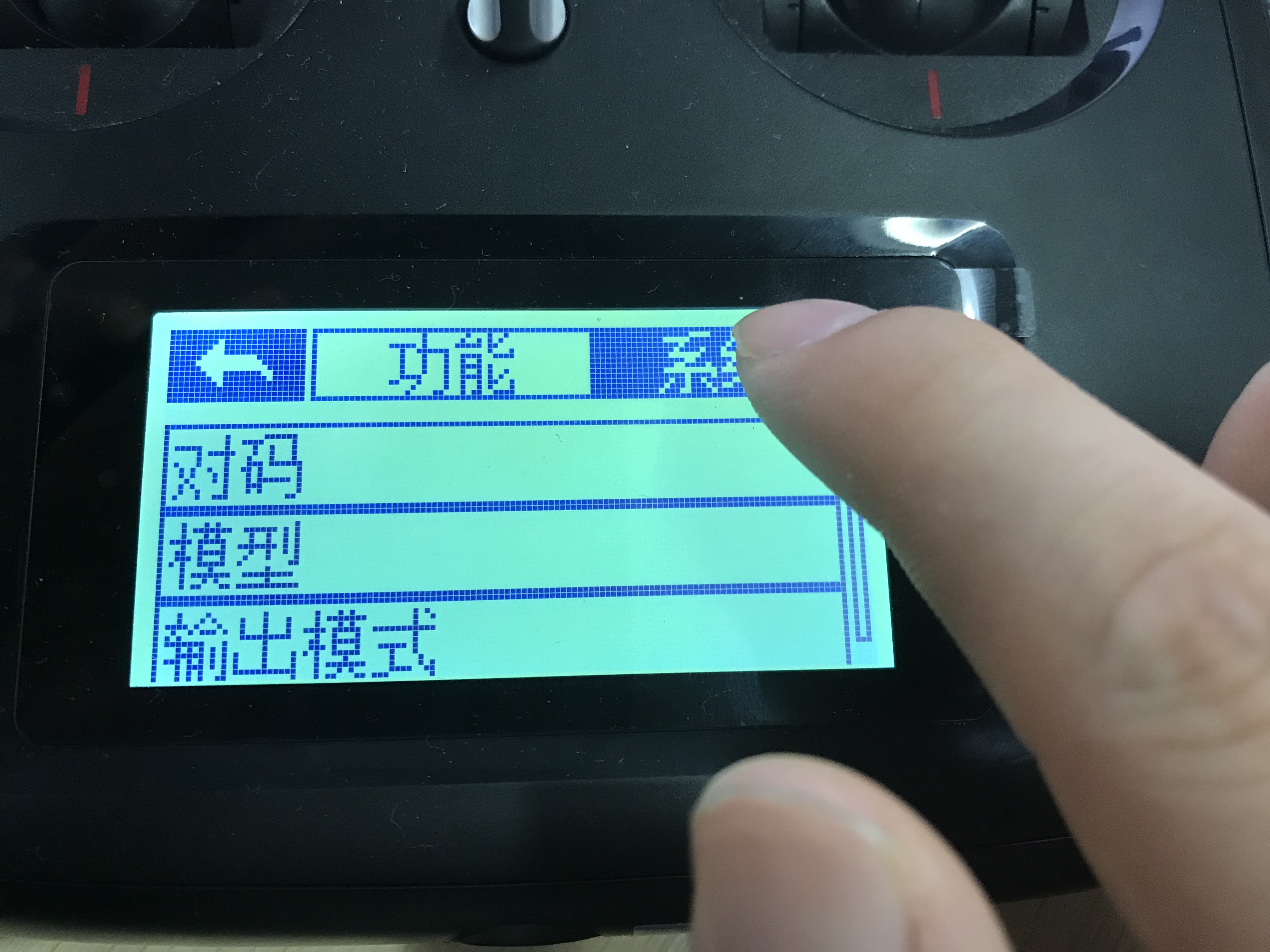
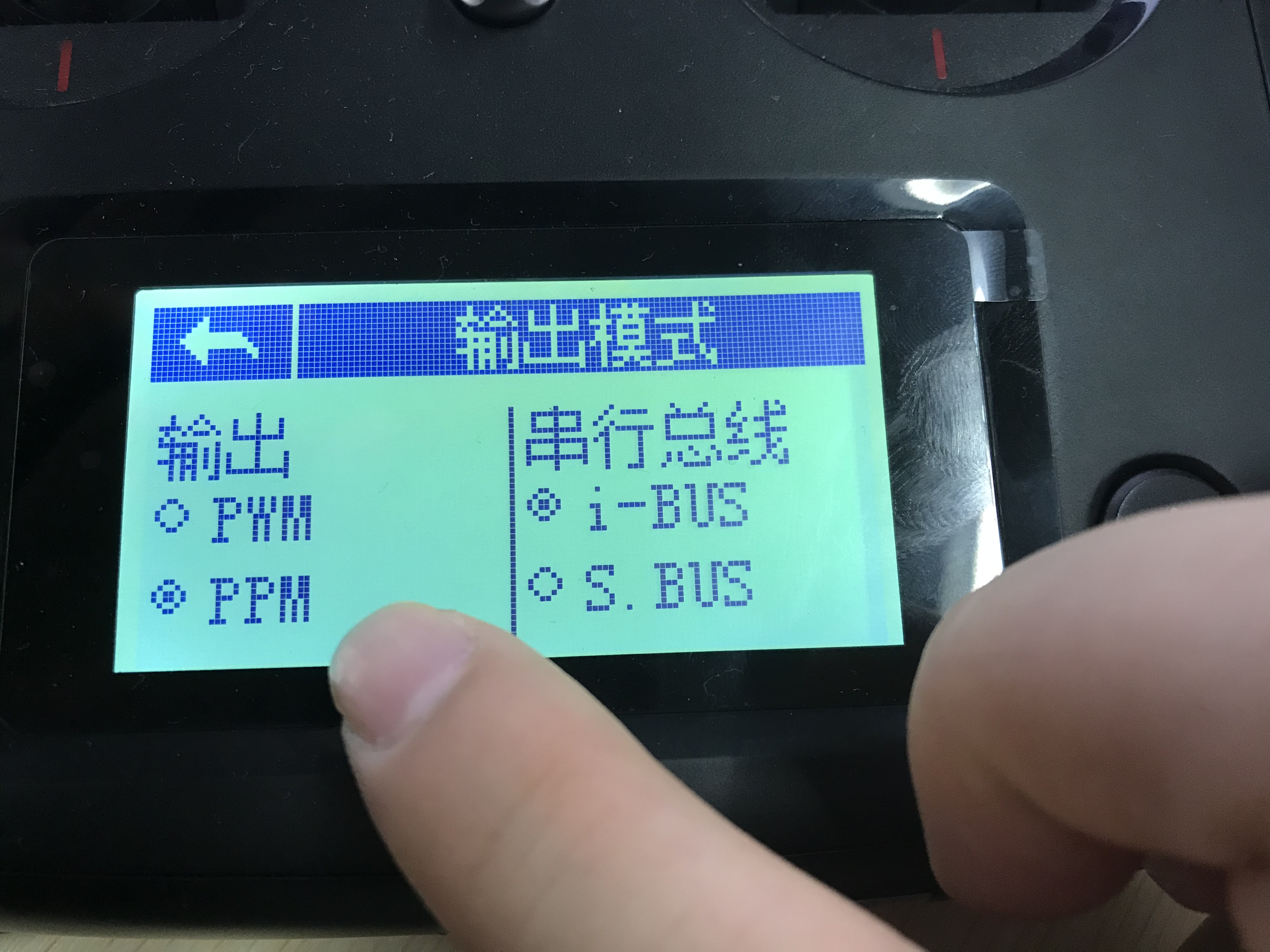
遥控器使用左手油门,两个摇杆均回中。使用了遥控器6个通道,5通道设置为SWC三段开关,用来控制飞行模式。飞行模式分别为自稳模式(stabilized),定点模式(position)和降落模式(land)。 6通道设置为SWD两段开关,用来激活/关闭offboard模式。接下来,将介绍富斯I6S该款遥控器常用的配置流程。
在未对频时,遥控器开机之后如下图所示,没有RX。表示该遥控器还未与接受机对频。






2.地面站设置¶
地面站的设置包括:固件烧写,机型选择,传感器校准,遥控器校准,飞行模式设置,电源设置。 之后的话,可能会配合视频使用。
主要参考文章: https://docs.qgroundcontrol.com/en/SetupView/SetupView.html
a.固件烧写¶
- 第一步. 打开QGC,点击飞行器设置图标
- 第二步. 选择固件菜单栏
- 第三步. 通过USB连接飞控与电脑端
- 第四步. 等待飞控连接地面站
- 第五步. 在右边选择框选择PX4飞行控制栈
在这里,我们使用提供的固件:
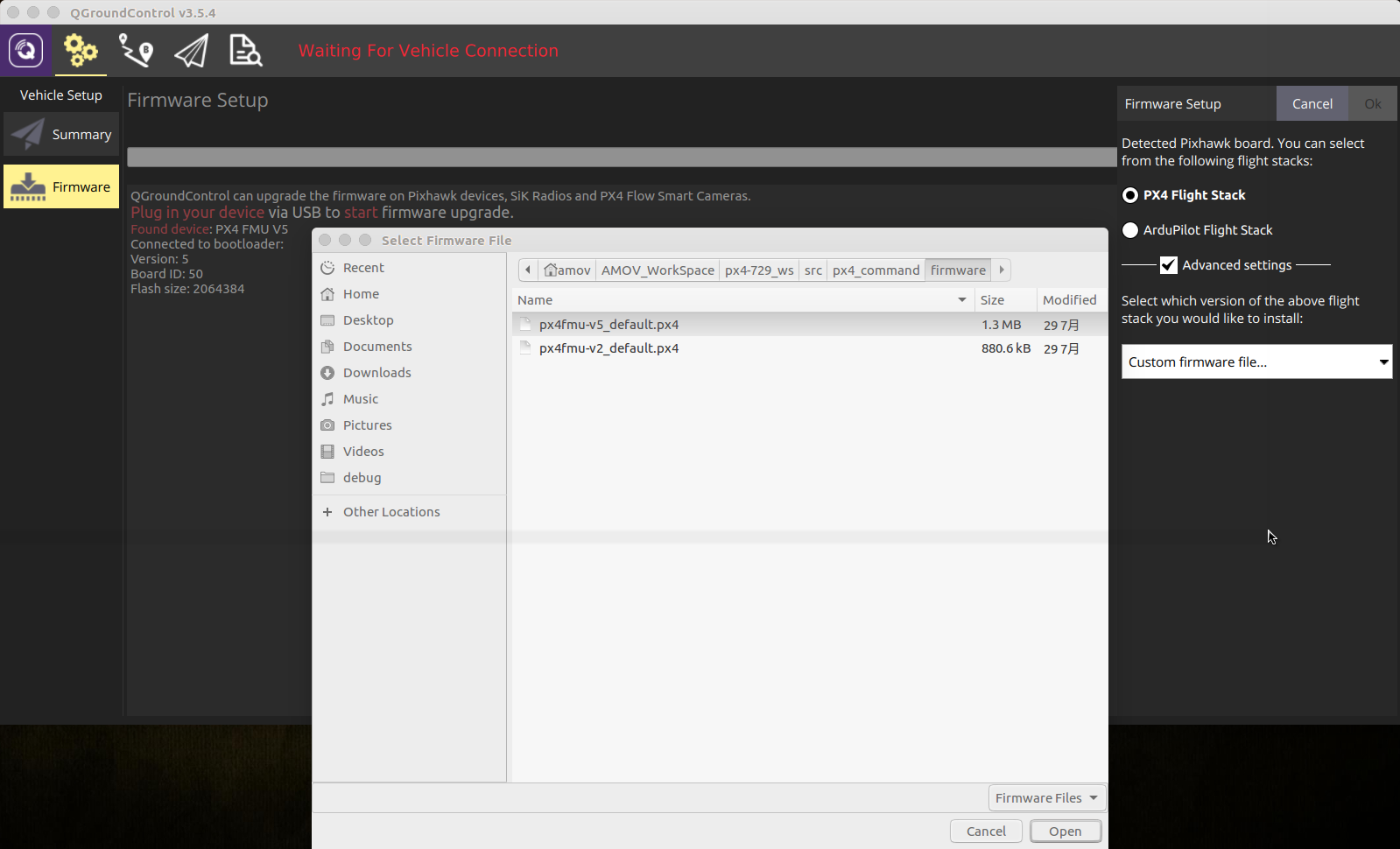
- 点击高级设置
- 选择我们下载好的固件文件(v2或者v5)
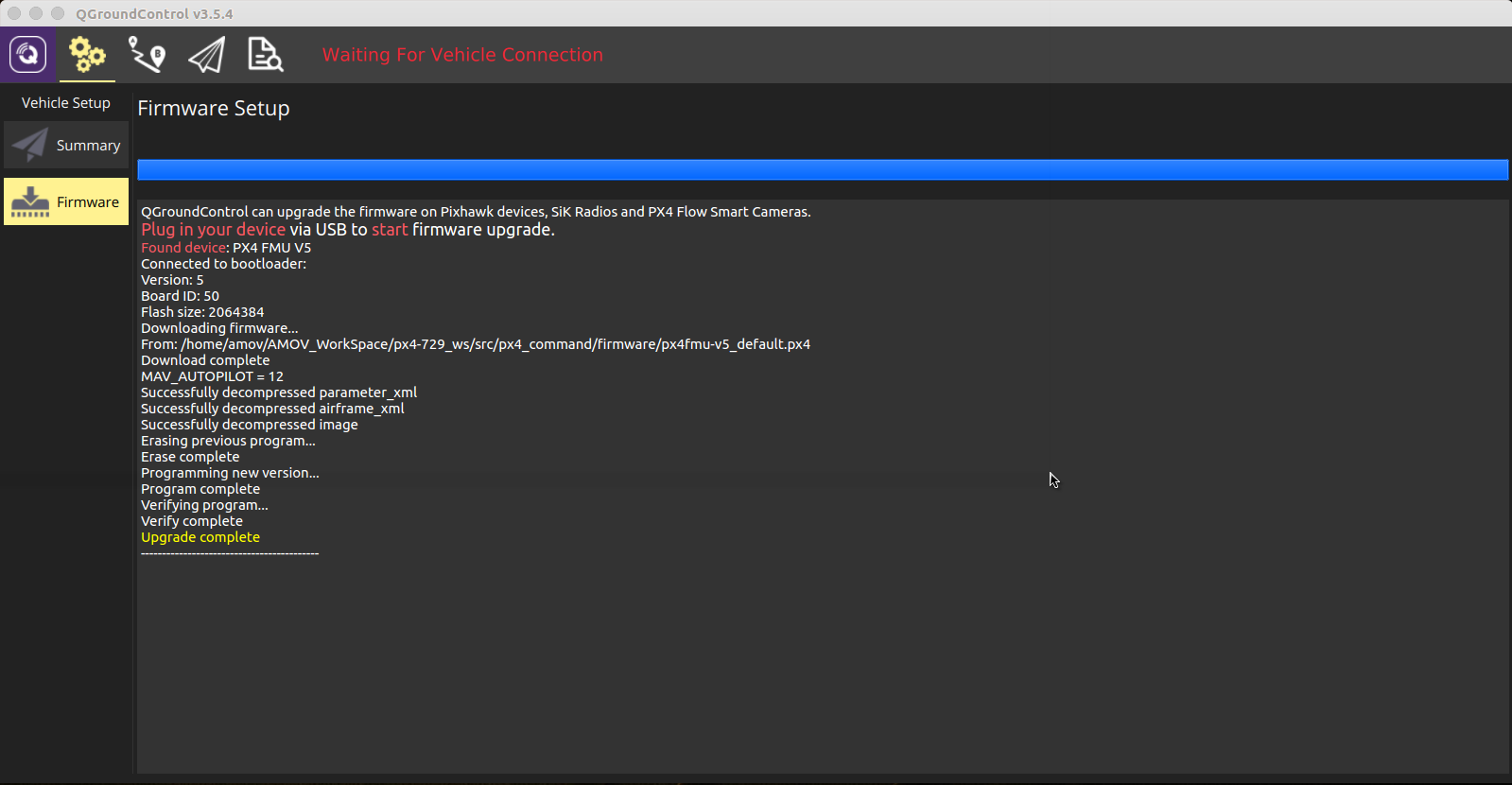
- 选择OK烧写固件
如果要用官网最新的固件,直接点击OK就行。等待烧写完成。
b.机型选择¶
- 1.点击飞行器设置图标
- 2.选择机型菜单栏
- 3.选择四旋翼机架类型,P600使用的是DJI450机架.如果没有合适的轴距,就选择通用机架.
- 4.选择完成之后,点击右上角 应用并重启
- 5.等待飞控重启
c.传感器校准¶
传感器的校准,首先点击 飞行器设置 图标;然后选择 传感器 菜单
罗盘校准:
- 选择磁罗盘子菜单
- 选择飞控的方向(如果飞控上的箭头方向与机架方向的箭头对齐,则选择默认ROTATION_NONE)
- 点击 OK 继续
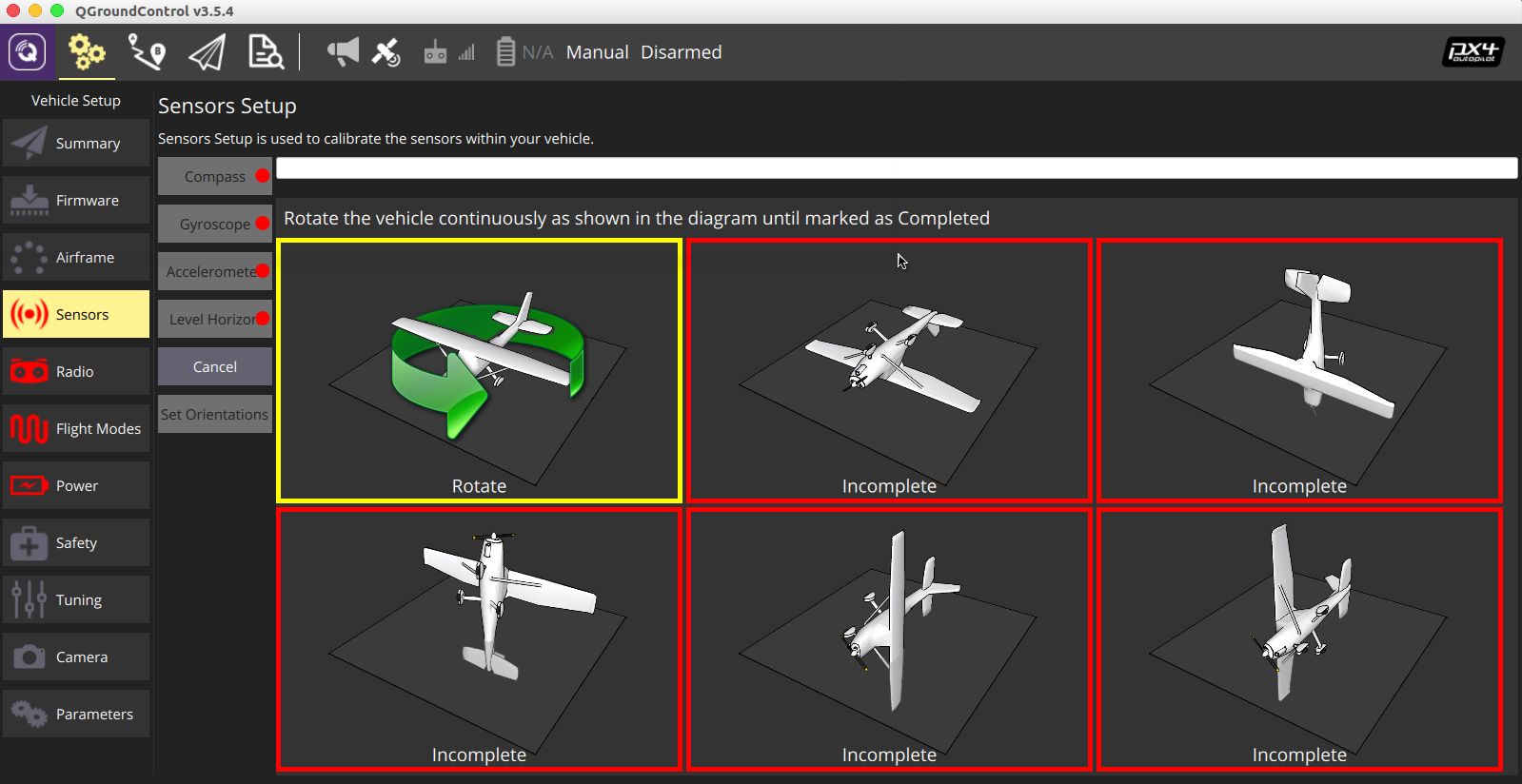
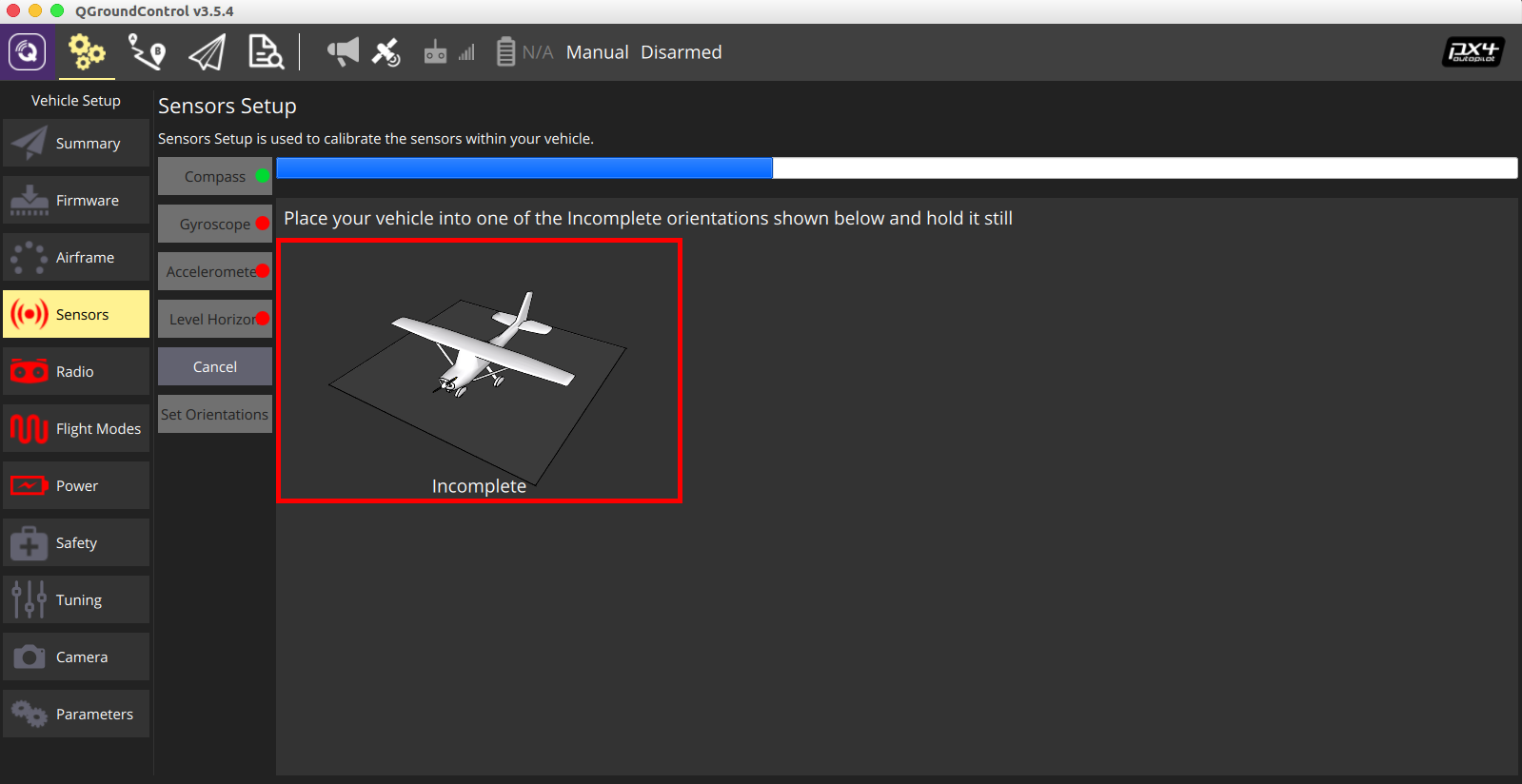
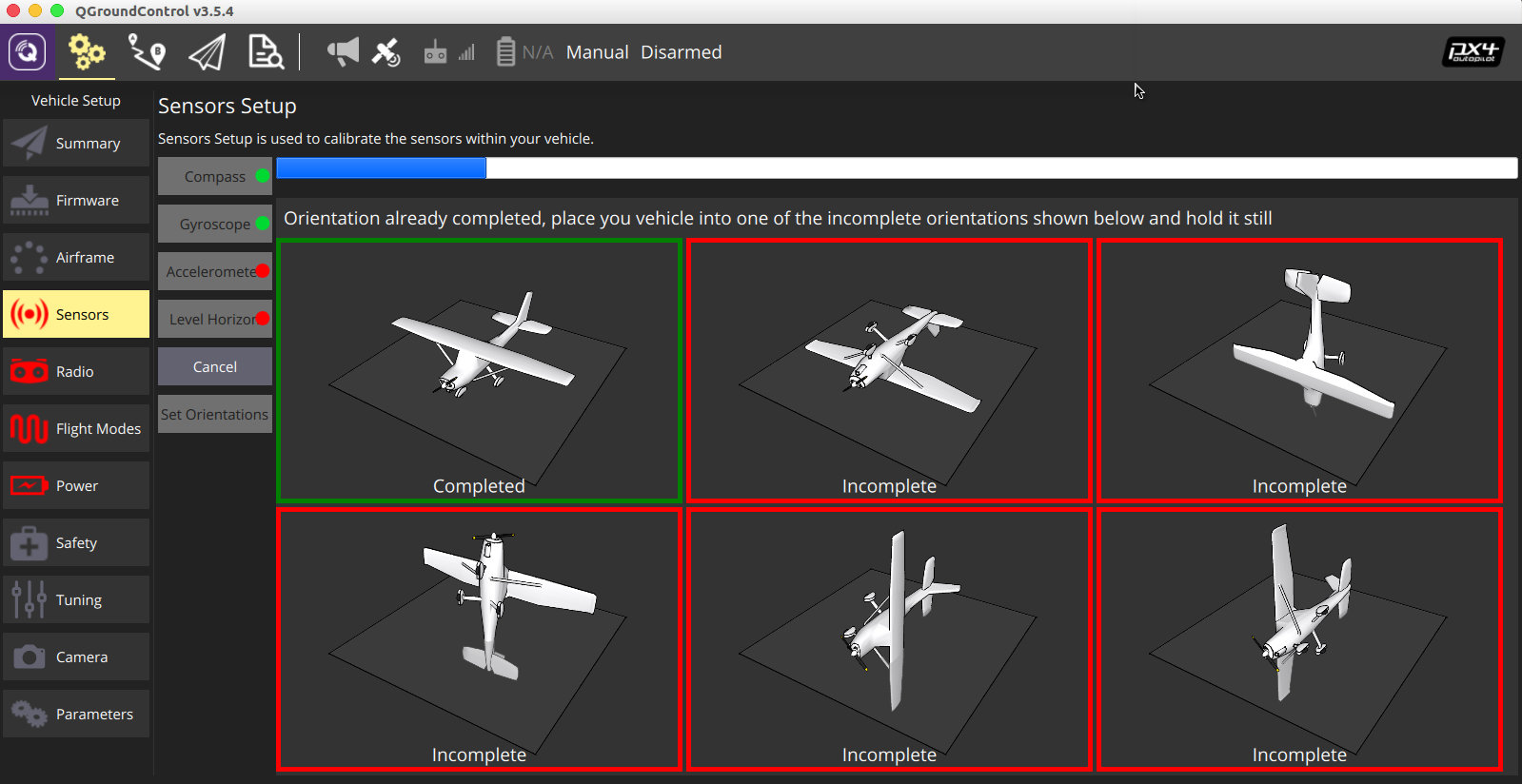
- 共有六个面需要校准,分别为前、后、左、右、上、下。红色轮廓表示未校准该面,黄色表示正在校准该面,绿色表示已校准该面。 按照未校准的朝向摆放无人机,摆放位置正确后,红色轮廓会变成黄色轮廓,表示正在校准该面。
- 然后根据需要旋转无人机,直到轮廓变成绿色。
- 对每个面都这样做,直到完成校准。
文章参考至 PX4 QGC用户手册 https://docs.qgroundcontrol.com/en/SetupView/sensors_px4.html
陀螺仪校准:
- 选择陀螺仪子菜单
- 无人机放置在水平面上(一般情况下,放在水平面即可;如果追求极致,可以将无人机放在水平仪上调节至水平)
- 点击 OK 继续
- 等待校准进度条完成
Warning
无人机在陀螺仪校准过程中应当保持静止不动
文章参考至 PX4 QGC用户手册 https://docs.qgroundcontrol.com/en/SetupView/sensors_px4.html
加速度计校准:
基本和磁罗盘校准类似,但不需要像罗盘校准那样旋转无人机。
- 选择加速度计子菜单
- 选择飞控的方向(如果飞控上的箭头方向与机架方向的箭头一致对齐,则选择默认ROTATION_NONE)
- 共有六个面需要校准,分别为前、后、左、右、上、下。红色轮廓表示未校准该面,黄色表示正在校准该面,绿色表示已校准该面。 按照未校准的朝向摆放无人机。摆放位置正确后,红色轮廓会变成黄色轮廓,表示正在校准该面。
- 保持无人机在该方向不动,直到轮廓变为绿色。
- 对每个面都这样做,直到完成校准。
文章参考至 PX4 QGC用户手册 https://docs.qgroundcontrol.com/en/SetupView/sensors_px4.html
水平校准:
- 选择水平仪子菜单
- 选择飞控的方向(如果飞控上的箭头方向与机架方向的箭头对齐,则选择默认ROTATION_NONE)
- 无人机放置在水平面上(一般情况下,放在水平面即可;如果追求极致,可以将无人机放在水平仪上调节至水平)
- 点击 OK 继续
- 等待校准完成
文章参考至 PX4 QGC用户手册 https://docs.qgroundcontrol.com/en/SetupView/sensors_px4.html
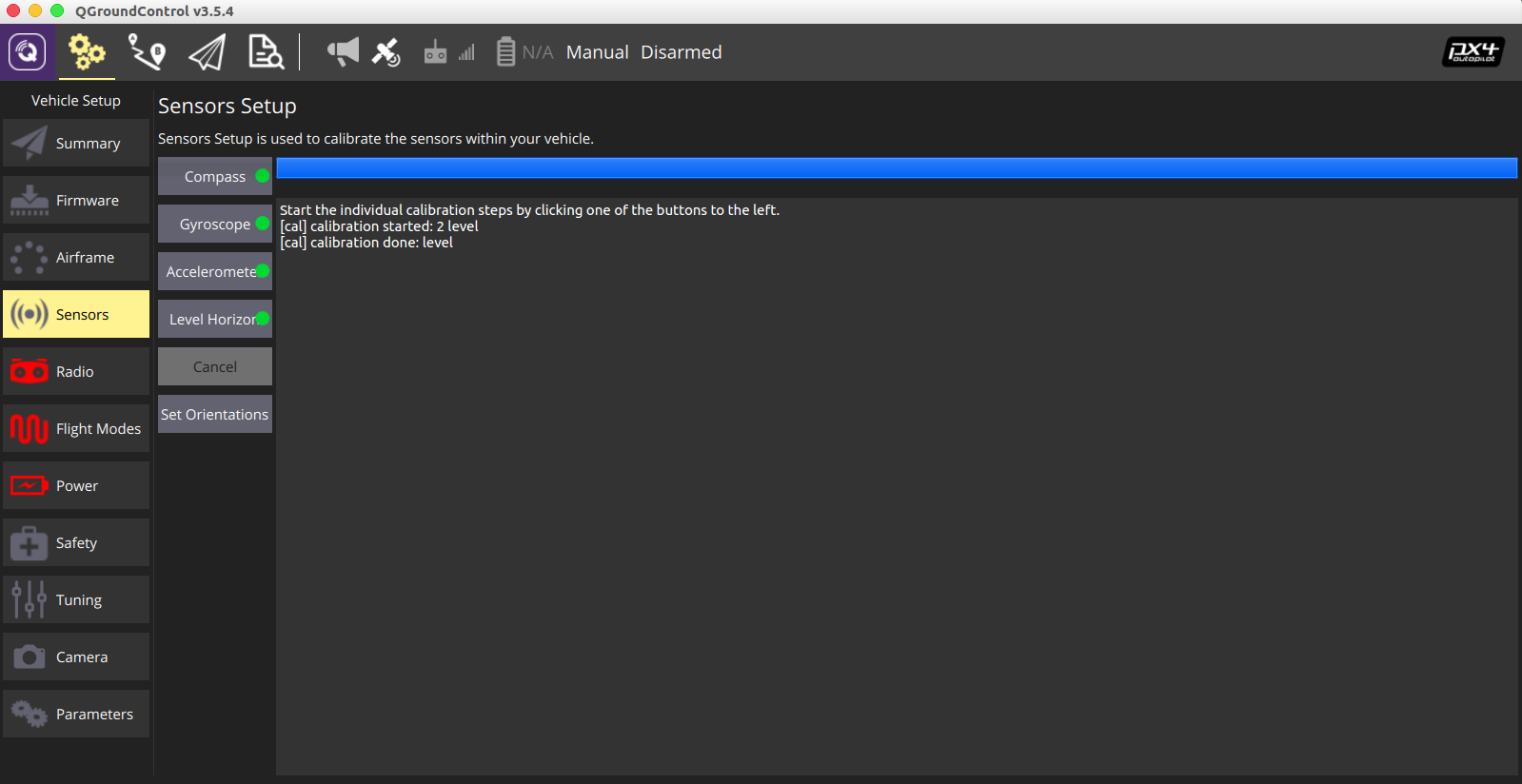
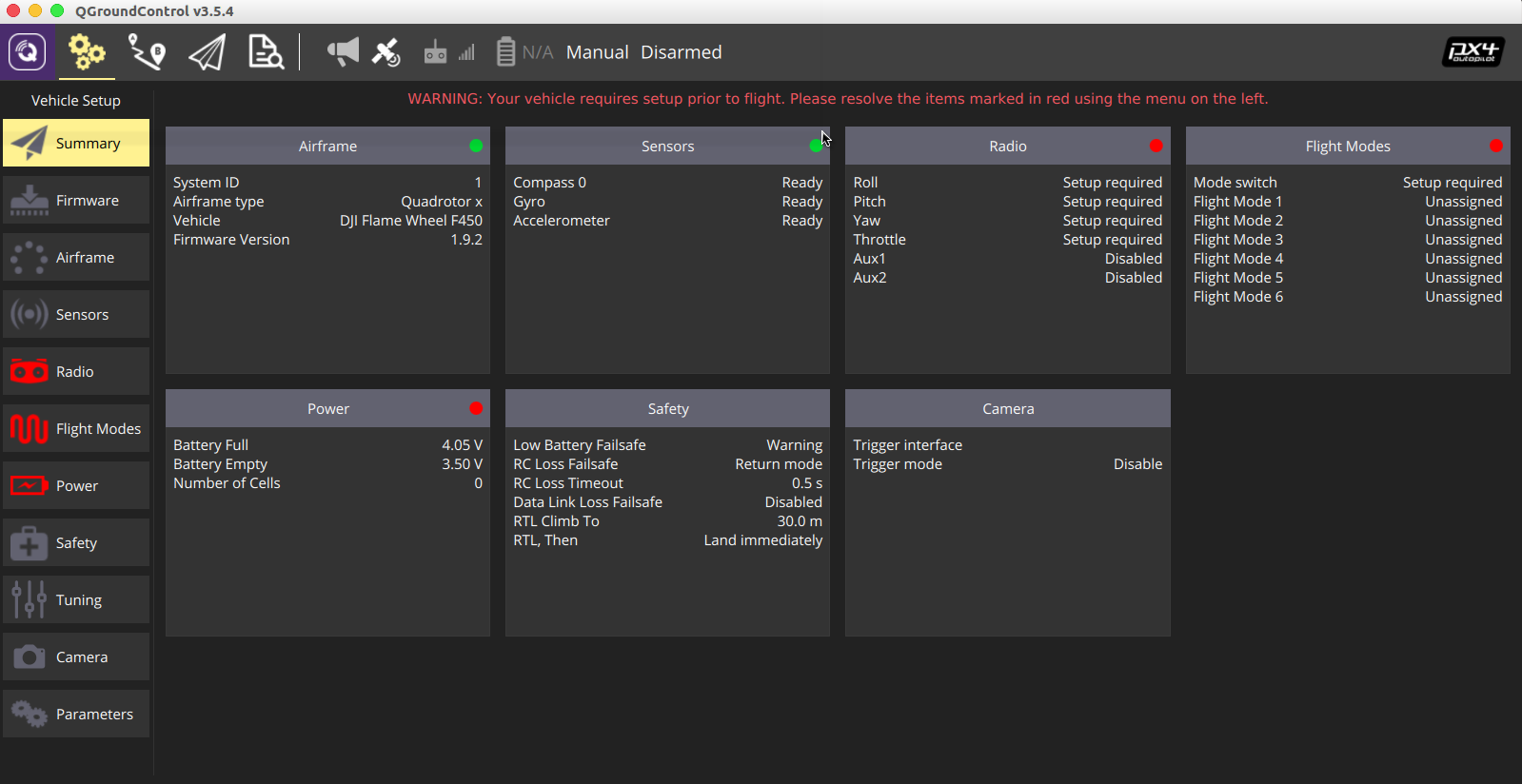
所有传感器校准完成:
d.遥控器校准¶
提前将油门,偏航,俯仰,横滚等摇杆的微调设置为零。这样,遥控器能够更加精准地控制无人机。
遥控器有两种模式。模式1是日本手,右手油门;模式2是美国手,左手油门。P600所配置的的遥控器是美国手。在校准遥控器时,选择 模式2(美国手) 。
开始校准遥控器:
- 1.点击飞行器设置图标
- 2.选择遥控器菜单栏
- 3.点击校准按钮,会弹出把所有微调和辅助微调都设置为0的提示。确认所有微调都设置为0后,点击确定,开始校准。
- 4.按照右边的图示,拨动相应的摇杆至图示位置。当 下一步 亮起时点击下一步,继续拨动相应的摇杆至图示位置,直到完成所有摇杆位置的校准。
- 5.完成摇杆校准后,会听到飞机发出两声“滴滴”的声音,提示摇杆校准已完成。
文章参考至 PX4 QGC用户手册 https://docs.qgroundcontrol.com/en/SetupView/Radio.html
e.飞行模式设置¶
提前在遥控器上设置好一个三段开关用作飞行模式开关,一般对应的是通道5;两段开关用作offboard模式开关,一般对应的是通道6。
P600用的三段开关的三个档位分别对应的是飞行模式1,飞行模式4和飞行模式6三种飞行模式。
飞行模式设置步骤如下:
- 1.点击飞行器设置图标
- 2.选择飞行模式菜单栏
- 3.选择通道5作为飞行模式开关
- 4.飞行模式1设置为”自稳模式(stabilized)”,飞行模式4设置为”定点模式(position)”,飞行模式6设置为”降落模式(land)”
- 5.设置通道6为offboard模式开关
设置完成后的结果如下图所示:
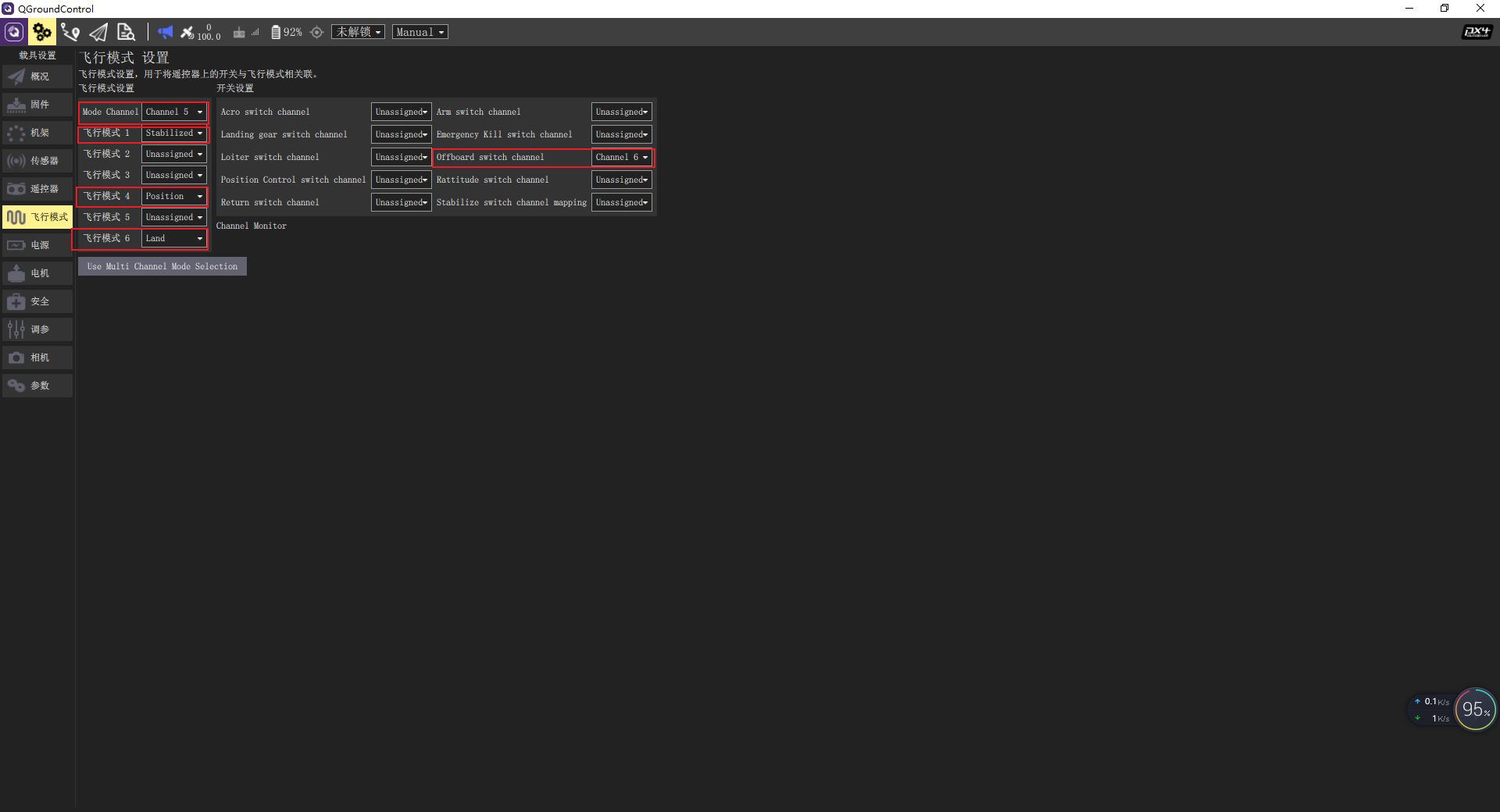
文章参考至 PX4 QGC用户手册 https://docs.qgroundcontrol.com/en/SetupView/FlightModes.html
飞行模式的介绍:
手动控制有三种,一种是自稳模式,一种是半自主模式,还有一种是特技模式。
辅助飞行模式:姿态(定高)模式和位置(定点)模式
自主飞行模式:offboard模式,自主任务模式,自主返航模式,以及自主降落模式。
f.电源设置¶
电源设置中,我们需要设置目前电池电压量,所以需要bb响。实测一下电池电压量。电调的校准也是在这完成的.
校准电源传感器
- 1.点击飞行器设置图标
- 2.选择电源菜单栏
- 3.P600飞机使用的是6s电池,因此在 电池芯数 输入框中输入6。满电电压(每芯)为4.2V,空电电压(每芯)为3.7V。(P200无人机为4S电池)
- 4.准备校准电压分压器。提前实测好电池总电压量。
- 5.点击电压分压器旁边的 计算 按钮,在右侧弹出一个对话框。根据提示输入实测的总电池电压,点击计算设置新的电压乘数。弹出的设置对话框如下图所示:
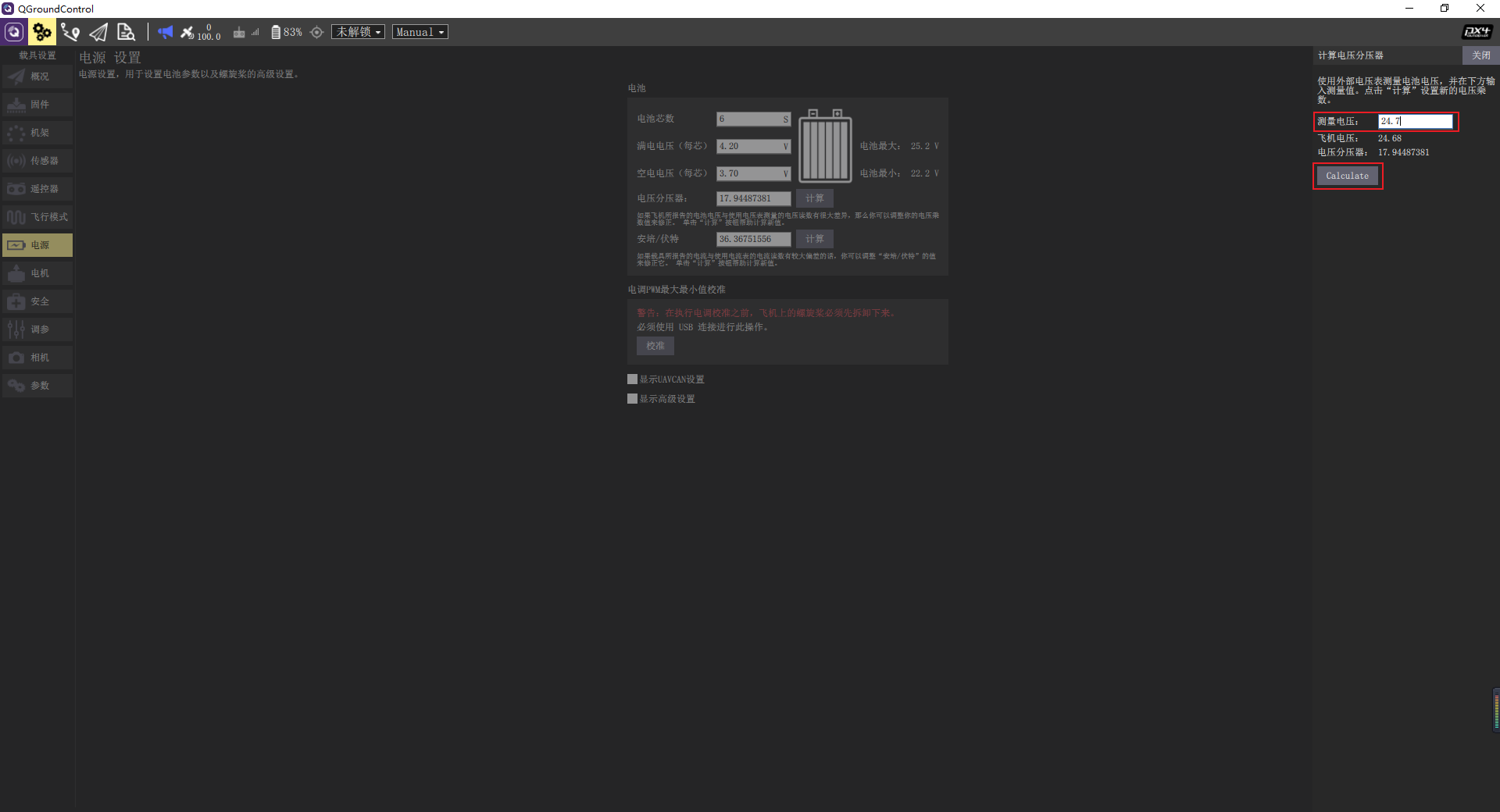
- 6.等到飞行器的电压与实测电压一致时,点击对话框右上方的 关闭 按钮,完成电源模块校准。如上图所示。
文章参考至 PX4 QGC用户手册 https://docs.qgroundcontrol.com/en/SetupView/Power.html
电调校准(ESC):
Warning
永远不要尝试在装桨叶的时候校准电调,因为在校准过程中电机会以最大转速旋转!
- 1.确保电池当前没有接通,且使用USB连接上飞控与QGC地面站
- 2.点击”校准”
- 3.当提示你接上电池,这时候再接上电池
- 4.等待校准完成
文章参考至 PX4 QGC用户手册 https://docs.qgroundcontrol.com/en/SetupView/Power.html
3.PX4入门¶
a.日志分析¶
有关PX4固件飞行过程中的详细数据,可以查看飞行日志分析.飞行日志是uORB主题中的消息,后缀名为.ulg的文件.首先可以用QGC通过数传(速度慢)或者USB在”分析图标”下面的”日志下载”菜单栏中下载对应的日志文件. 另外一种获取日志方式,拔出飞控中的SD卡,然后用读卡器获取到相应的日志文件.
日志分析
日志分析工具推荐使用flightplot。在 github 下载与电脑操作系统一致的安装包,该软件的使用需要有Java环境。
在flightplot软件中,你可以查看与飞控相关的所有主题。列出你所需要查看的主题,然后就可以将该主题显示在图表上了。
PX4中主要的主题
主题完整的列表可以在固件下的 msg文件 中找到。下面是比较重要的几个topic(主题):
- vehicle_status 无人机的各个状态(导航状态,解锁状态,系统状态),飞行模式
- vehicle_local_position 无人机本地状态
- vehicle_attitude 无人机姿态角
- vehicle_local_position_setpoint 无人机位置的相对目标点
- vehicle_global_position 无人机全球位置
- vehicle_vision_position 无人机视觉位置
- att_pos_mocap
- actuator_controls 电机的信号控制
- vehicle_land_detected 无人机降落检测
b.PID调参¶
4.手动飞行¶
您向我们购买到手的飞机,可以不用执行“ 2.地面站设置 ”中的校准过程。因为在飞机出厂前我们都已经校准好了,您可以直接开始手动飞行。 在上面的遥控器对频使用过程中,也讲过在遥控器上面设置三种飞行模式,分别为自稳模式、定点模式以及降落模式。 如果你对px4的飞行模式还不了解的话,请参考 飞行模式介绍。
纯手动飞行模式:在飞行模式为stabilized下,手动控制飞行。在室内没有GPS的情况下,GPS的指示灯为蓝色闪烁,此时,可以手动解锁,控制无人机飞行。如果没有飞行经历的话,建议先在模拟器上熟练遥控器,然后再实际飞行。
辅助飞行模式:定高或者定点飞行,定高飞行不需要使用GPS,定点模式飞行需要GPS,在室外可以测试飞行,定点模式(position)有油门阈值,在油门量的40%~60%是油门死区.高于60%或者低于40%油门摇杆才会有向上或者向下的动作.
自主飞行模式:mission模式中,可以在QGC地面站上面规划预先规划好了的路径,该飞行模式也是需要在室外有GPS的地方测试.
文章参考至 PX4 用户使用手册 https://docs.px4.io/master/en/flying/missions.html
下面介绍到手飞机的手动飞行说明:
- 首先要清楚遥控器的SWC三段开关代表的是飞机的三种飞行模式。向外(远离摇杆)飞行模式为自稳模式(也就是手动模式),中间(开关位置在中间)飞行模式为定点模式(在手动飞行中无需使用),向内(靠近摇杆)飞行模式为降落模式(在手动飞行中无需使用)。
- 遥控器是美国手,左手油门。左摇杆上下表示油门大小,左摇杆左右表示偏航;右摇杆上下表示俯仰,右摇杆左右表示横滚。
手动飞行之前将WIFI数传配置为AP模式(也可以配置为网卡模式)。在同一局域网下,QGroundControl使用TCP连接到飞控,从而查看飞控当前状态。
手动飞行步骤:
- 上电,连接WIFI数传至QGroundControl,查看飞控当前状态有无报错
- 遥控器解锁,解锁方式为内八式解锁,解锁之后飞机有怠速
- 遥控器控制飞机,油门慢慢推起至飞机飞起来,如果飞机有明显倾斜,可以一边慢慢推油门,一边稍微打一点俯仰或者横滚(根据飞机倾斜位置,反方向修正)
- 正常用遥控器控制飞机各个姿态变化.