自主飞行之入门¶
1.ROS¶
ROS官网: 维基
ROS是用于开发复杂的分布式机器人系统的广泛使用的框架.
2.MAVROS¶
3.px4_command介绍¶
px4_command功能包是一个基于PX4开源固件及Mavros功能包的开源项目,旨在为PX4开发者提供更加简洁快速的开发体验。 目前已集成无人机外环控制器修改、目标追踪、激光SLAM定位、双目V-SLAM定位、激光避障等上层开发代码、后续将陆续推 出涵盖任务决策、路径规划、滤波导航、单/多机控制等无人机/无人车/无人船科研及开发领域的功能。 配合板载计算机(树莓派、TX2、Nano)等运算能力比较强的处理器,来实现复杂算法的运行,运行得到的控制指令通过串口或者网口通信发送给底层控制板。

- state_from_mavros.h:订阅飞控状态,包括无人机当前的状态(/mavros/state),当前位置(/mavros/local_position/pose),当前速度(/mavros/local_position/velocity_local),和当前角度,角速度(/mavros/imu/data)
- command_to_mavros.h:发布px4_command功能包生成的控制量至mavros功能包,可发送期望位置,速度(本地系与机体系),角度,角速度,底层控制(遥控器输入)
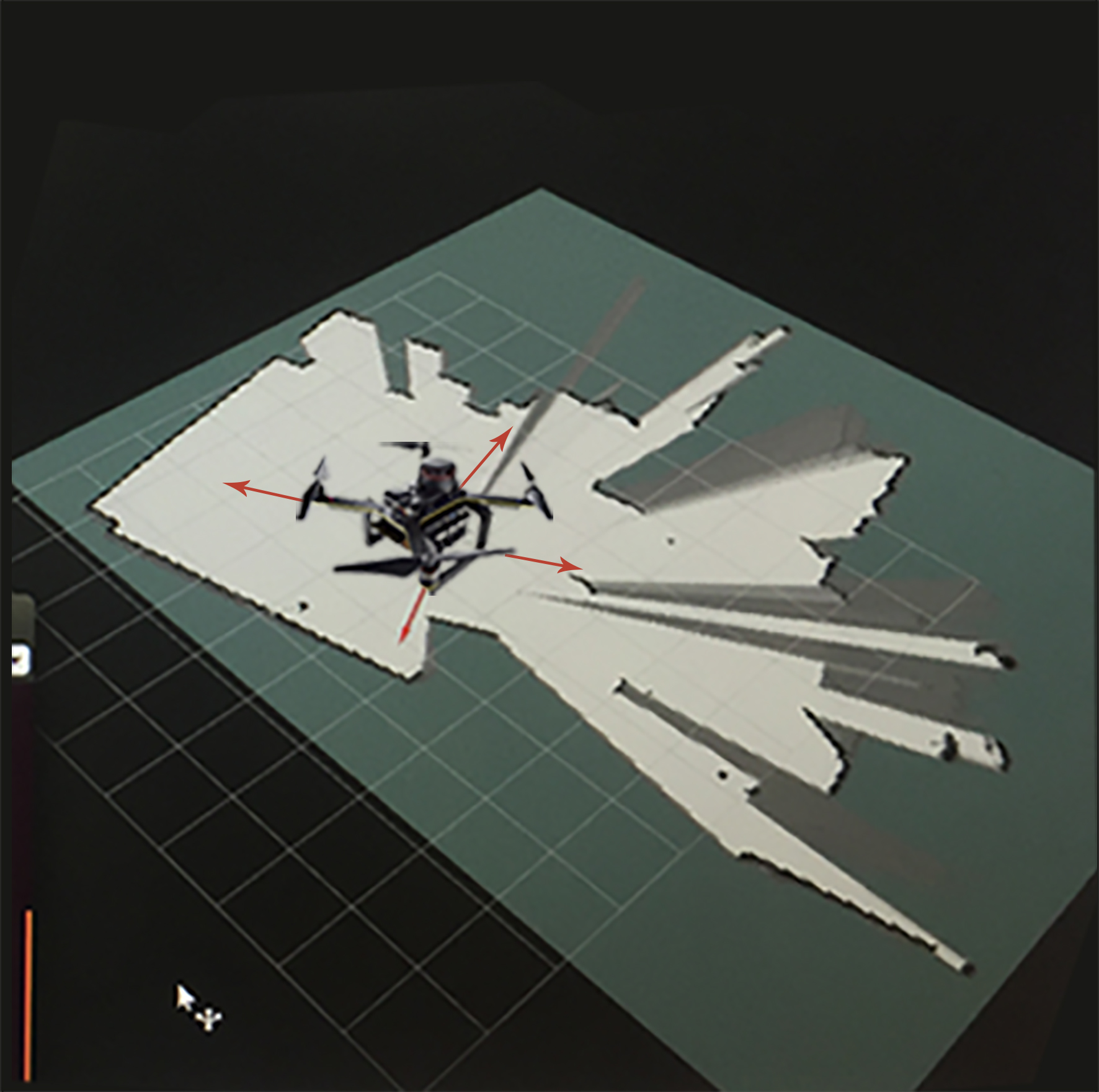
- px4_pos_estimator.cpp:订阅激光雷达或者mocap发布的位置信息,并进行坐标转换,在state_from_mavros.h中已订阅飞控发布的位置,速度,欧拉角信息,此处直接使用,根据订阅的数据,发布相应的位置,偏航角给飞控
- px4_pos_controller.cpp:订阅由位置估计发布的DroneState,初始化当前飞机状态的时间.订阅ControlCommand(不知从何发布的数据).发布topic_for_log主题.在选择控制率,检查参数正确后,初始化完成.对move节点中,takeoff,Move_ENU,Move_Body,Hold,Land,Disarm,PPN_land和Trajectory_Tracking等进行逻辑处理.
- ground_station.cpp:订阅自定义日志主题(/px4_command/topic_for_log),订阅视觉系统位置估计PoseStamped主题(/vrpn_client_node/UAV/pose,非mavlink消息,数据包括point位置(x,y,z),四元数方向(w,x,y,z)),订阅飞控姿态四元数AttitudeTarget主题(/mavros/setpoint_raw/target_attitude,#82号mavlink消息).不断的更新视觉传感器状态,并打印当前飞机的状态.
- px4_sender.cpp:订阅自定义消息控制指令主题(/px4_command/control_command),机体系到惯性系坐标转换,move中控制命令的具体实现(0表示位置控制,3表示速度控制)
- autonomous_landing.cpp:降落识别使用xyz均为速度控制.订阅数据包括降落板与无人机的相对位置,降落板与无人机的相对偏航角,视觉flag 来自视觉节点.最后发布位置控制指令
- collisiom_avoidance_streo.cpp:订阅/streo_distance该数据作为计算飞机四个方向的距离判断.
- formation_control_sitl.cpp:多机仿真SITL,只适用于Move_ENU坐标系下,若使用Move_Body,需自行添加修改.
- payload_drop.cpp:订阅/mavros/local_position/pose本地位置.发布遥控器通道值.
- square.cpp:发布/px4_command/control_command命令.子模式xyz均为位置控制.
- target_tracking.cpp:
- move.cpp:发布/px4_command/control_command,并设置子模式xy速度控制(0b10),位置控制.z速度控制(0b01),位置控制
- set_mode.cpp:模拟遥控器,根据mavros服务,进行在SITL下解锁,切换offboard,控制飞行器.
- TFmini.cpp:激光定高雷达的处理,如果需要添加超声波传感器,可参考此代码.
4.飞行前准备¶
飞行前请确保可以在手动模式下进行正常飞行,并且QGC以及远程连接上飞机的飞控
5.自主飞行说明¶
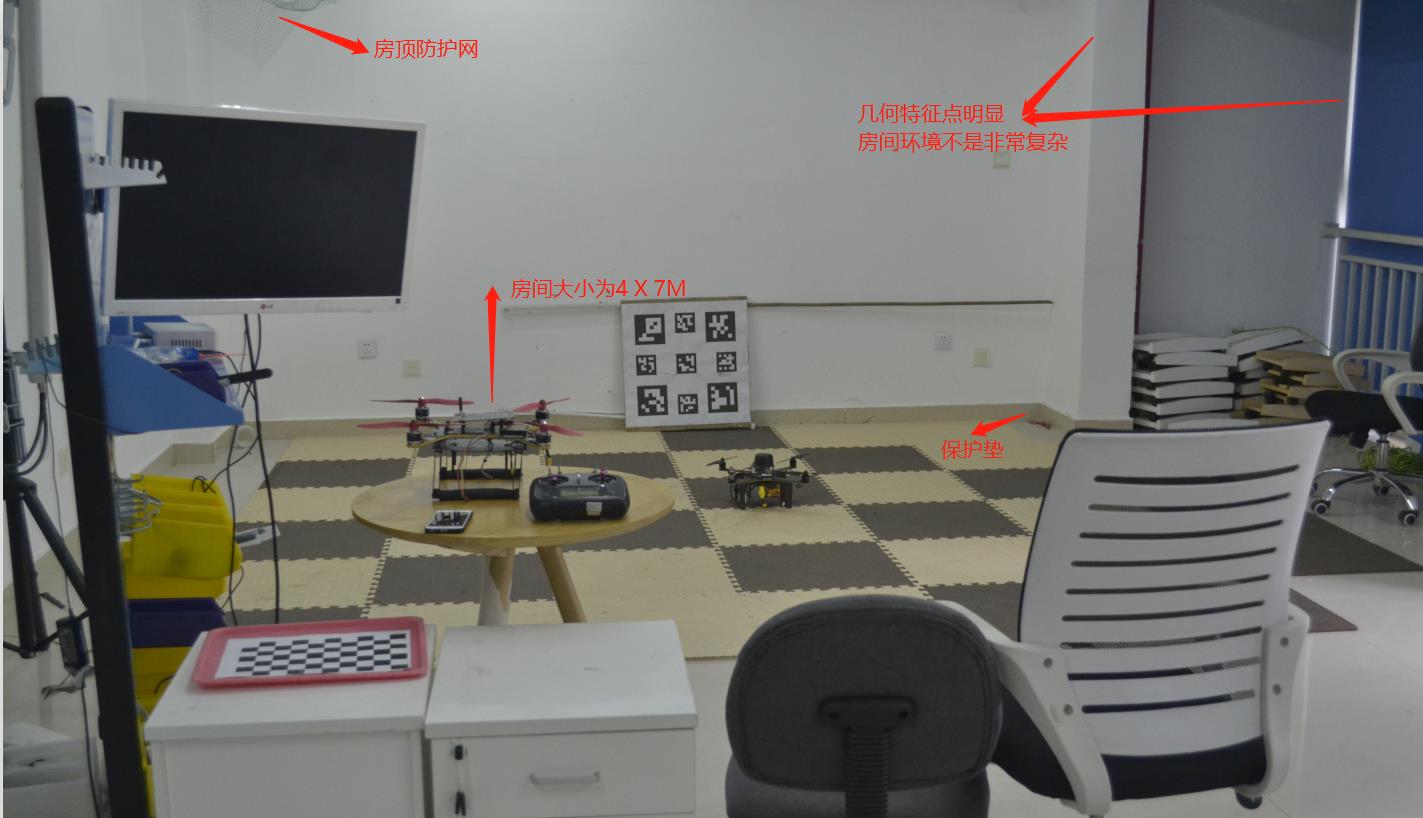
自主飞行可分为室内和室外两种模式,相应的室内分为激光SLAM飞行模式和视觉SLAM飞行模式,室外分为视觉SLAM飞行模式和GPS/RTK飞行模式. 每一种飞行模式又对应分为TX2板载计算机和Nano板载计算机.在每一种飞行模式中,你就可以进行室内外相应的实现定点飞行,降落等.
Tip
每一种飞行模式的位置来源有所不同,这里在QGroundControl地面站中有两个非常重要的参数,该参数决定了使用不同的飞行模式需要选择不同的位置数据来源 EKF2_AID_MASK和EKF2_HGT_MODE,前者是位置数据来源参数.后者是高度数据来源参数.
室内飞行¶
激光SLAM¶
室内激光雷达定位模式
- EKF2_AID_MASK = 24 (选择位置以及偏航来源) ; EKF2_HGT_MODE = Vision/Range sensor(选择高度来源)
TX2¶
参数确定后尝试解锁,遇到解锁不成功,看看提示是否需要重新校准磁罗盘?解锁成功,电机启转,这时切记不要上浆试飞, 因为此时激光雷达没有工作,没有给飞控送入位置以及高度信息,所以此时姿态控制失效,飞机一飞就会偏。这是我们固件 的bug,近期会修复,请注意。
在TX2板载计算机系统里打开终端进入如下图所示目录并启动脚本:
./my_lidar_imu_fly.sh
脚本会依次启动各个launch文件
正常情况下各个窗口会正常工作,其中有个 px4_pos_estimate 节点要特别注意,如下图。
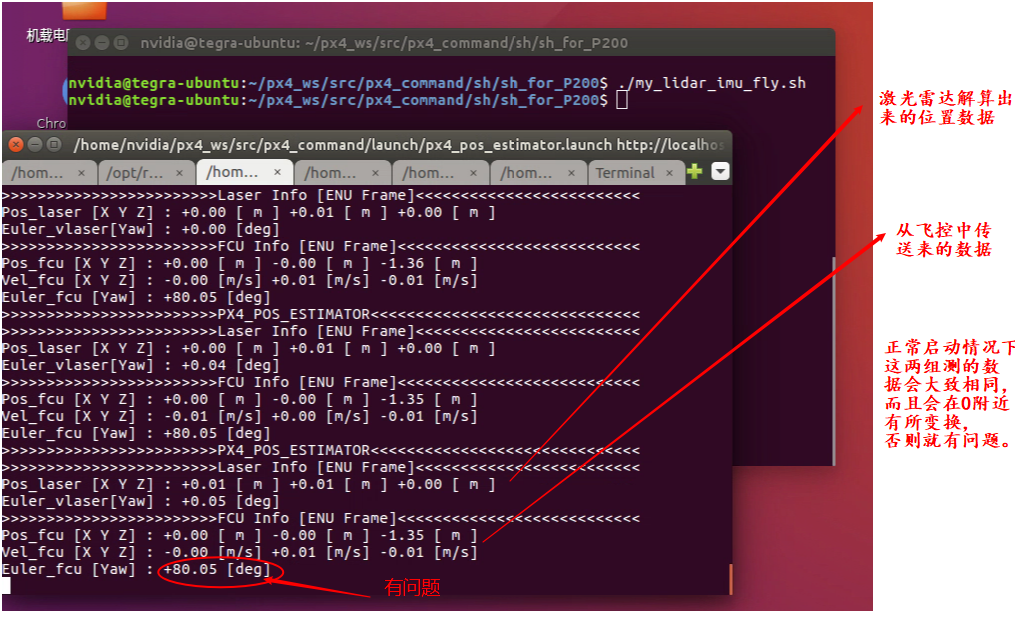
当出现上述问题,需重新启动飞控以及脚本,飞控的重启需要在地面站的控制台上,输入 reboot 然后回车即可。

NANO¶
与TX2类似,找其相应的启动脚本即可.
视觉SLAM¶
室内视觉SLAM定位模式
- EKF2_AID_MASK = 24 (选择位置以及偏航来源) ; EKF2_HGT_MODE = Vision/Range sensor(选择高度来源)
TX2¶
把飞机放在室内待起飞点,远程已连接好板载计算机与飞控。
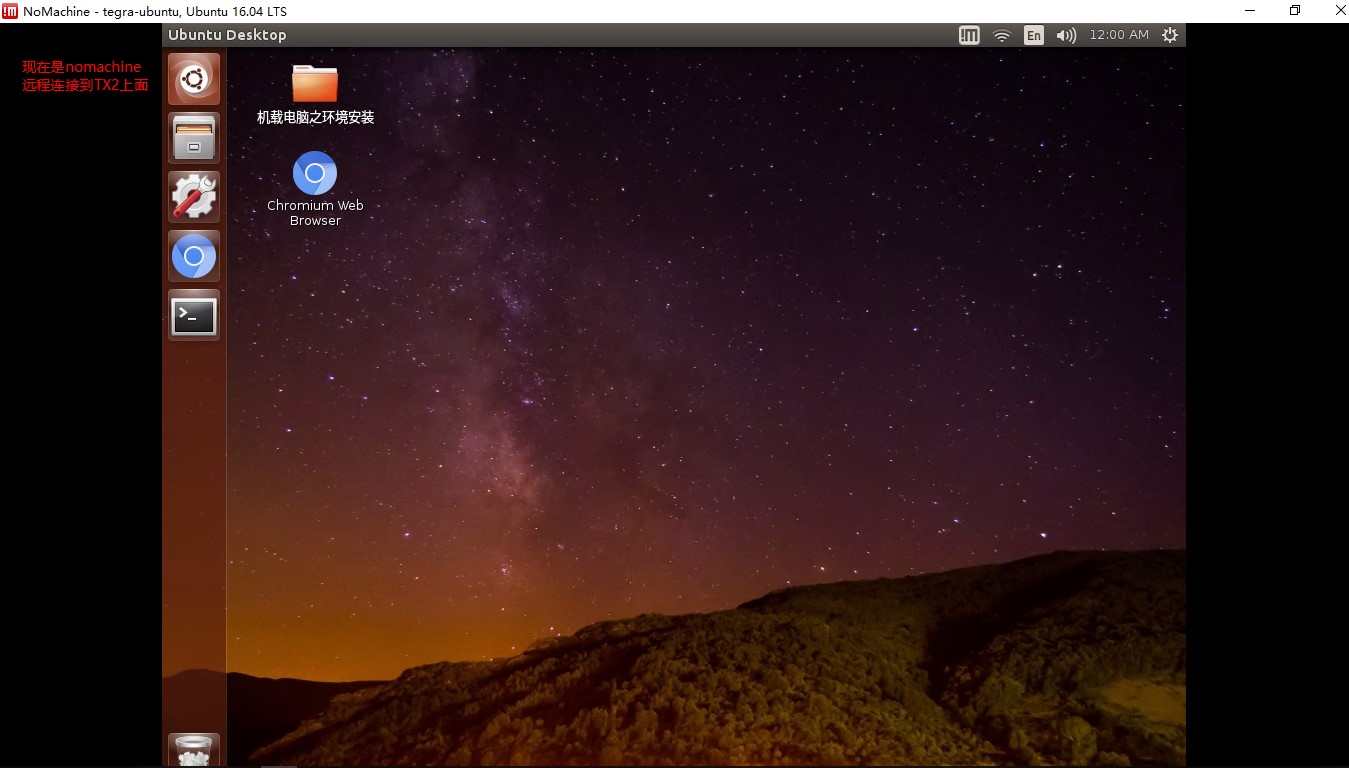
现在已经连接上了nomachine,第一步就是打开目录,进入到amov_ws/src/px4_command/sh/sh_for_P200/vio目录下面,待会准备启动的脚本为vio_fly.sh.(图片)

然后进行第二步,鼠标右击空白处选择打开一个终端(图片)

第三步输入启动脚本的执行指令 ./vio_fly.sh

第四步,启动脚本完成之后,自动开启脚本终端.第一个终端为 roscore 此处不做详解.查看mavros脚本是否正常启动,如果红圈内容说明mavros正常与飞控已经建立了通信连接. (如果出现报错的话,请仔细查看报错的内容原因是什么,坐标系相关的报错是正常的,不影响我们飞行使用).图片

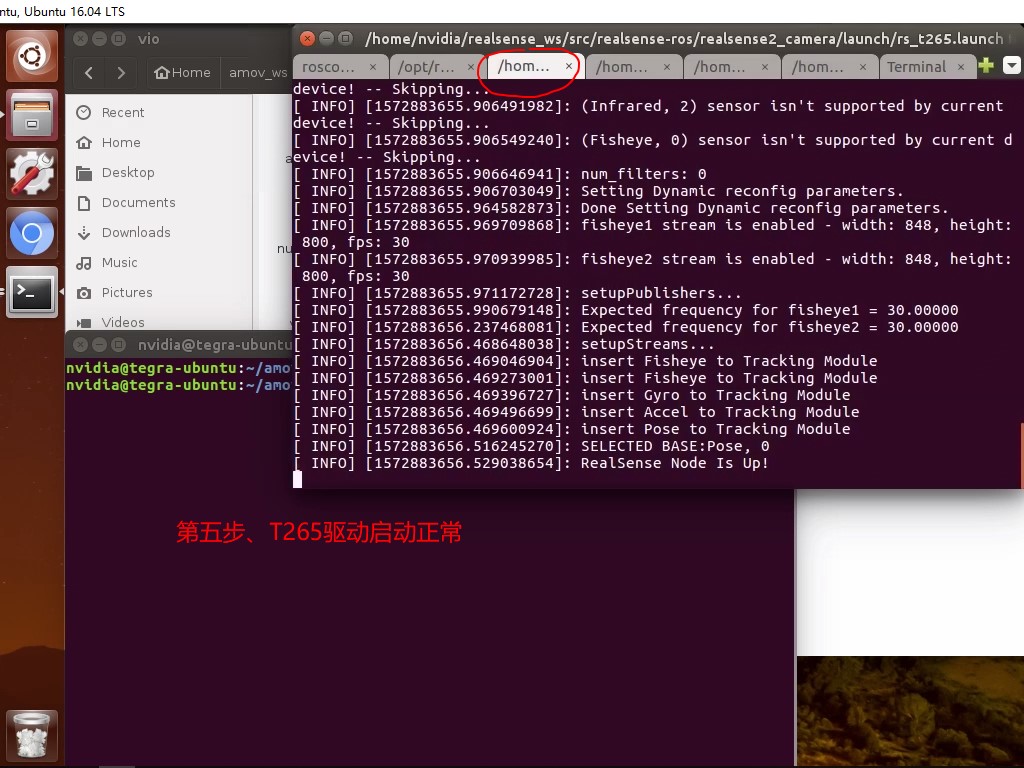
第五步,该脚本是T265驱动启动脚本,该脚本正常运行,说明T265已经正常启动.
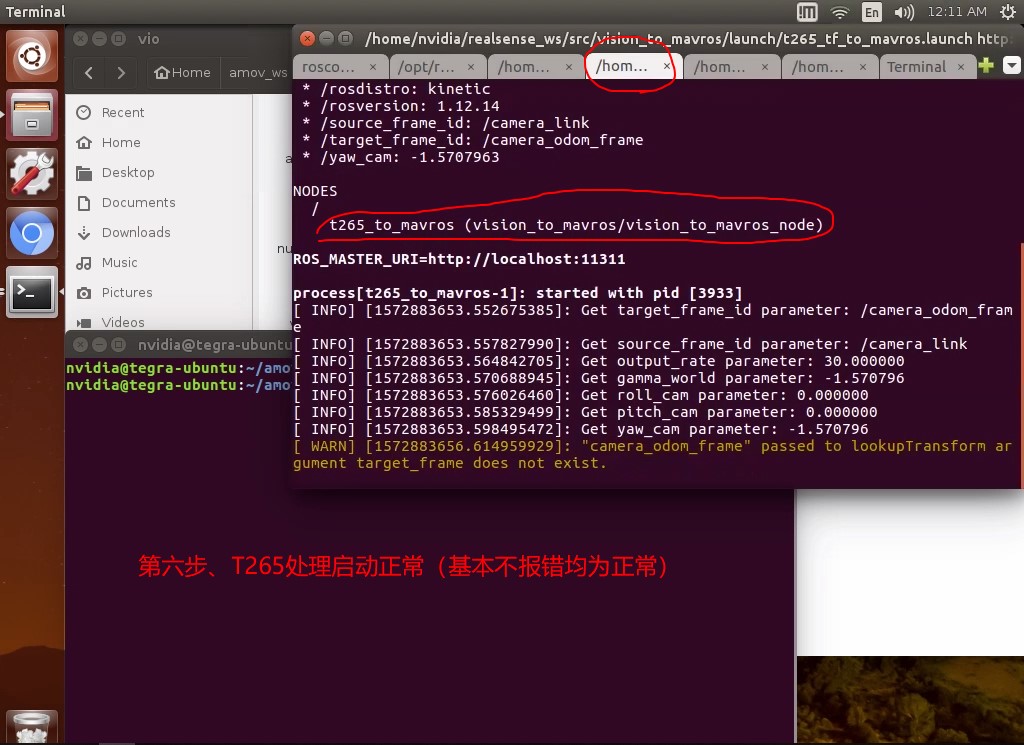
第六步,是T265的处理脚本,不是异常错误就是正常的,此脚本角T265的位置信息提供给了位置估计节点,以用作位置估计定位
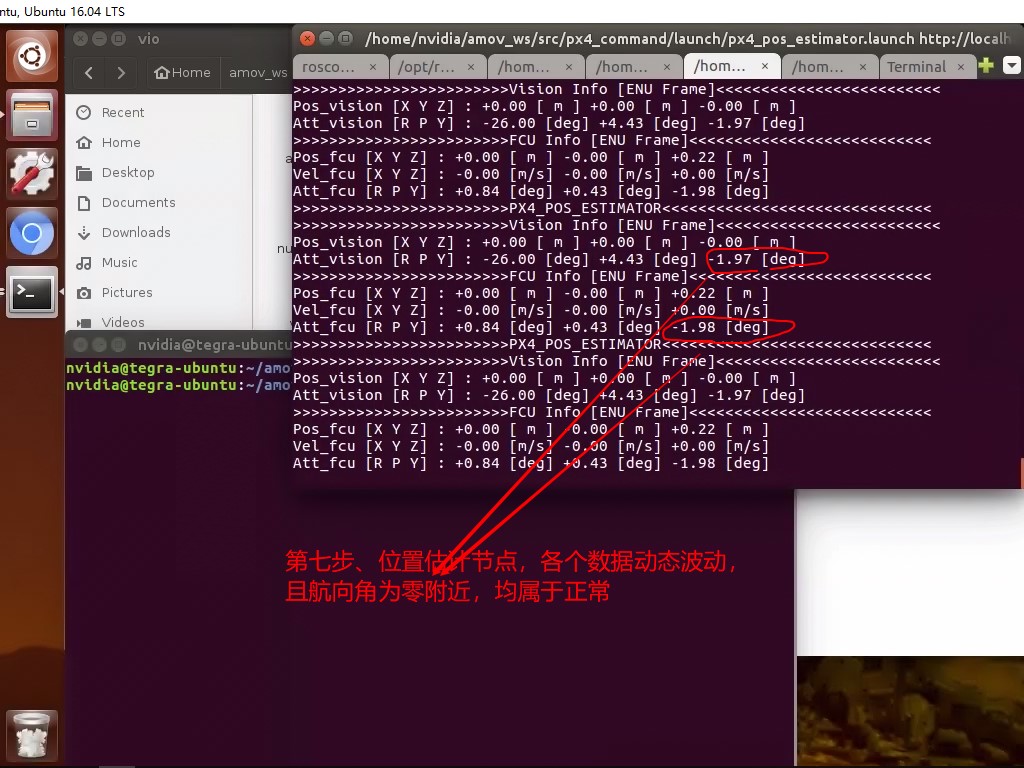
第七步,位置估计脚本,此处有多处打印消息,包含视觉信息,飞控信息,两者的各个数据基本保持动态波动就是正常的,波动很大就是非正常现象.如下图所示为正常.
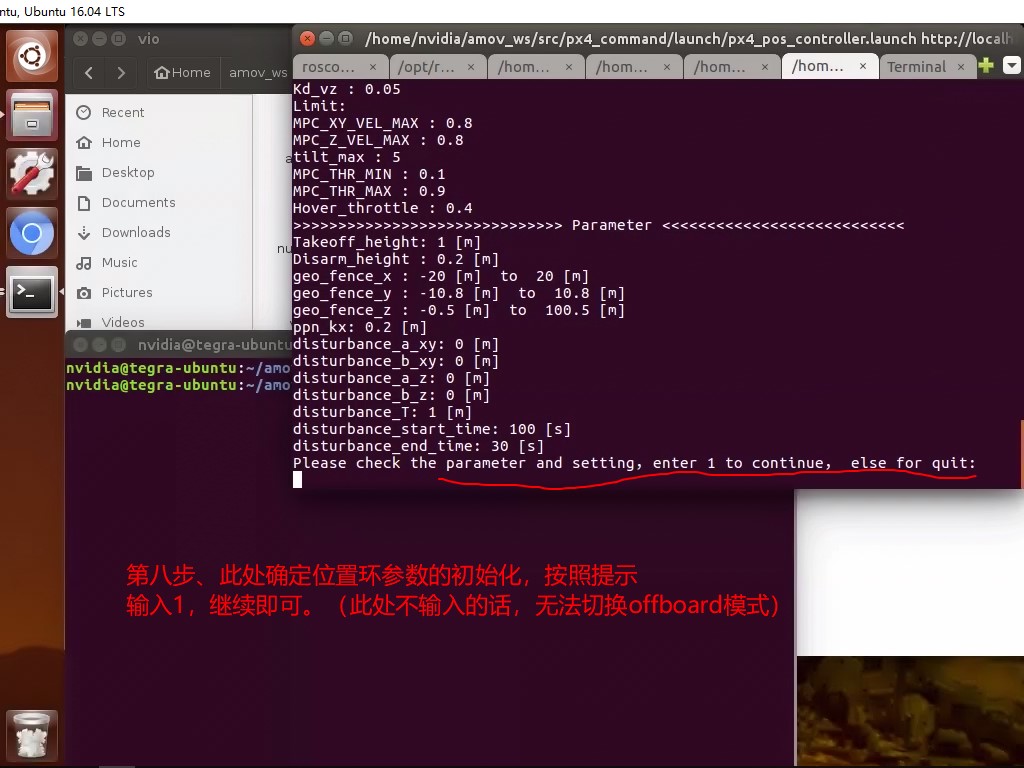
第八步,是位置控制节点,按照提示输入1继续,它是位置环参数的初始化.如果此处不输入1继续的话,你可以在室内进行定位飞行,但是不能切换到offboard模式. 只有输入了1,确认位置环参数之后,才能进入offboard模式.
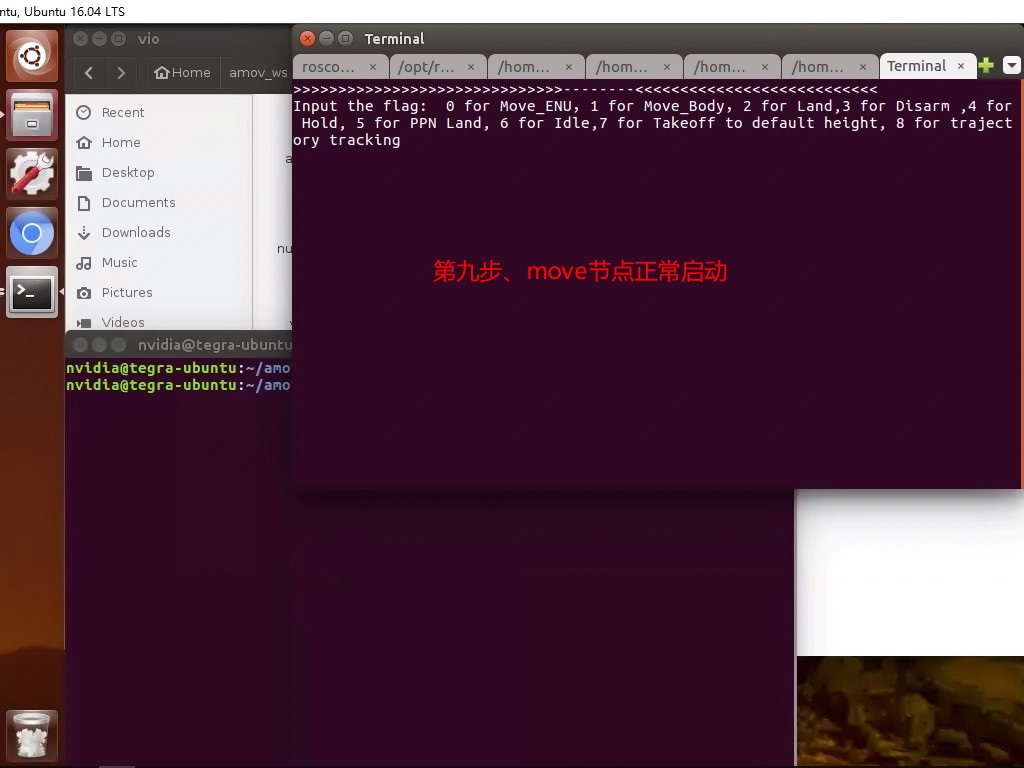
第九步,为move节点,正常启动.他可以控制飞机前后左右,位置速度控制飞行.
此时你也可以用另外一台电脑连接到飞控中去,按照开箱第一步的教程执行.上面脚本如果都能正常运行的话,此时在遥控器上的5通道(三段)拨到中间, 将飞行模式改为定点模式,在地面站QGC上面可以看到是可以切到定点飞行模式的,这就说明,此时可以在室内进行定点飞行了.

NANO¶
使用操作和TX2类似,区别在于文件目录不一致.