硬件及软件介绍¶
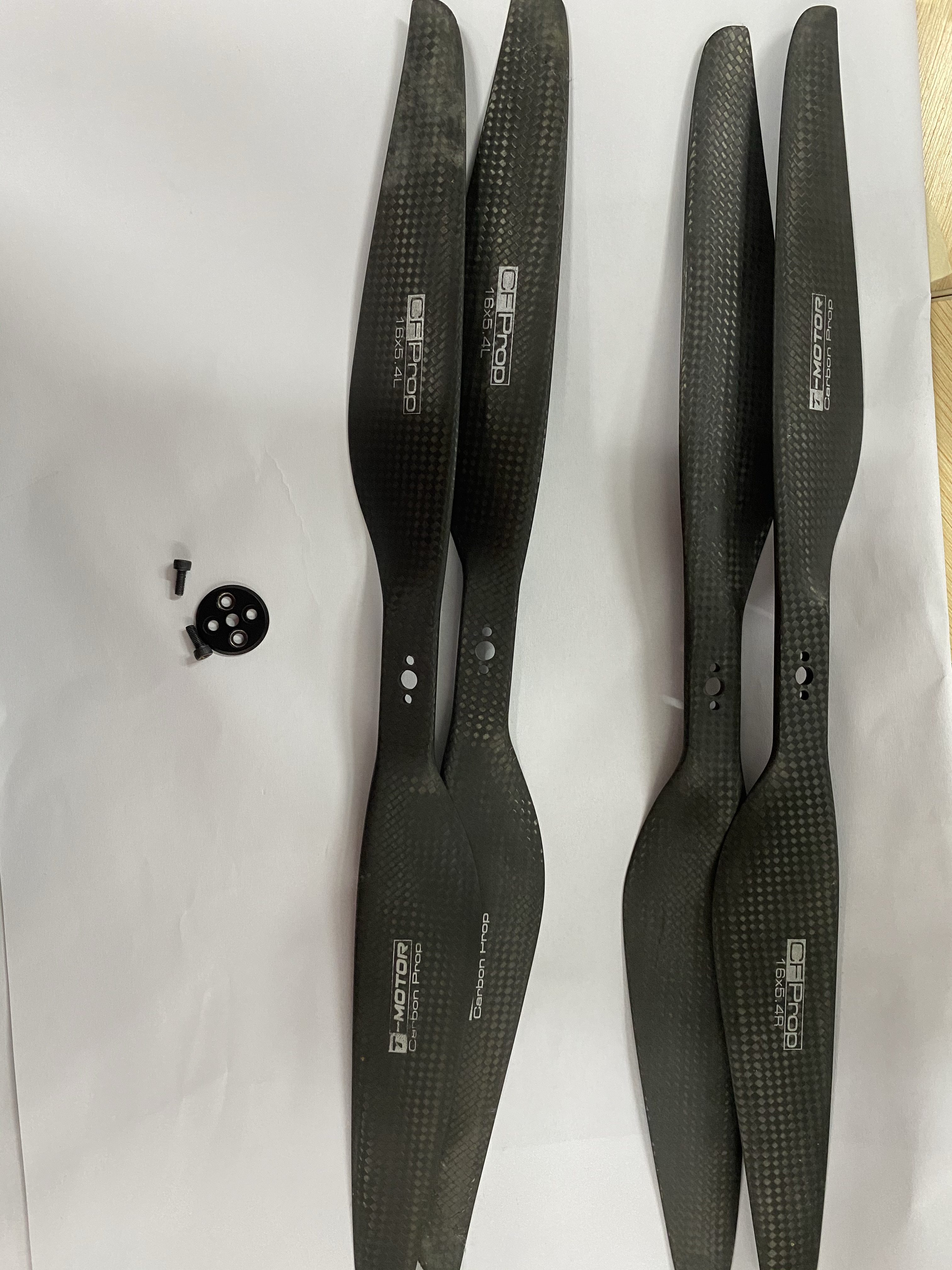
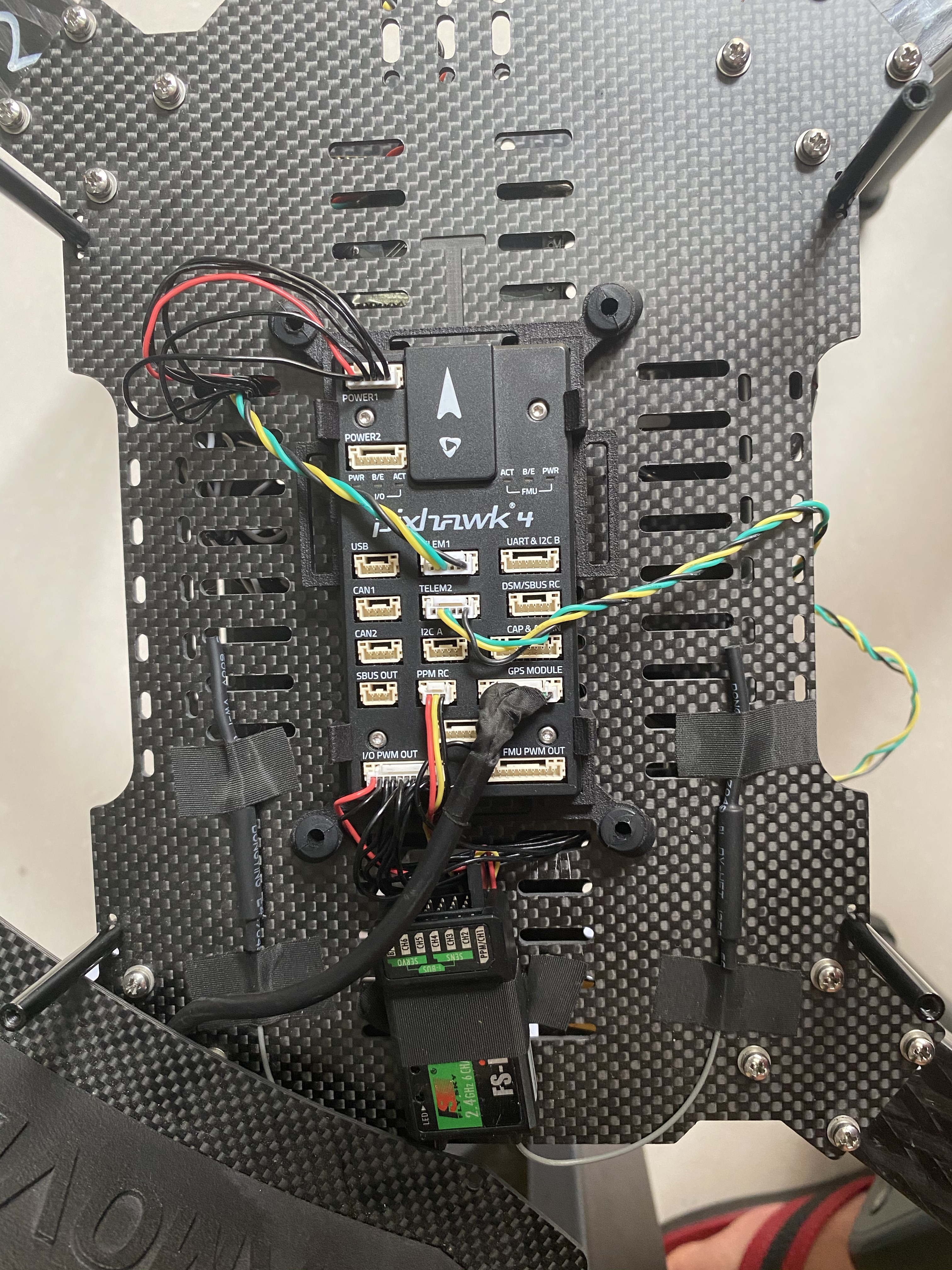
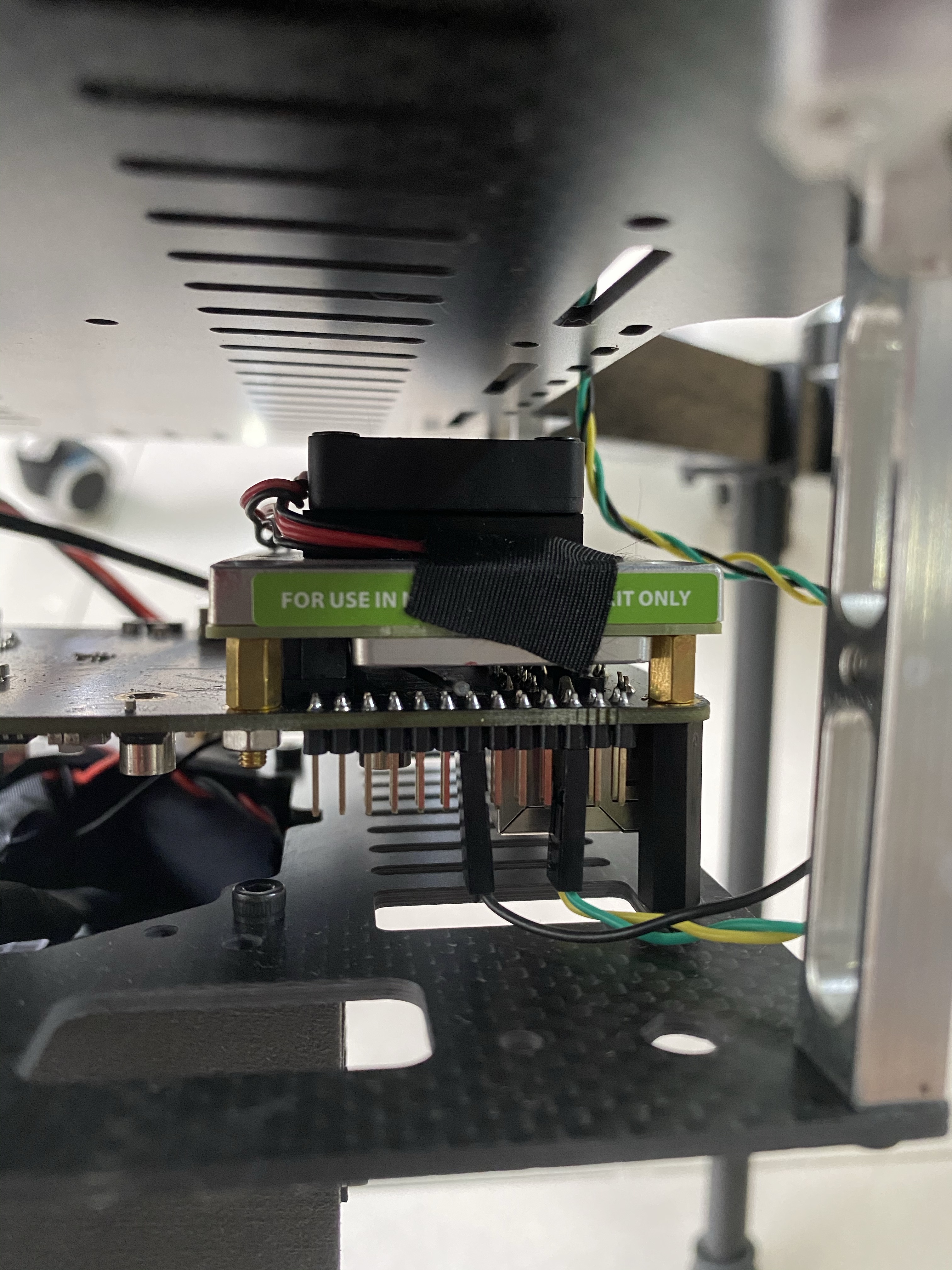
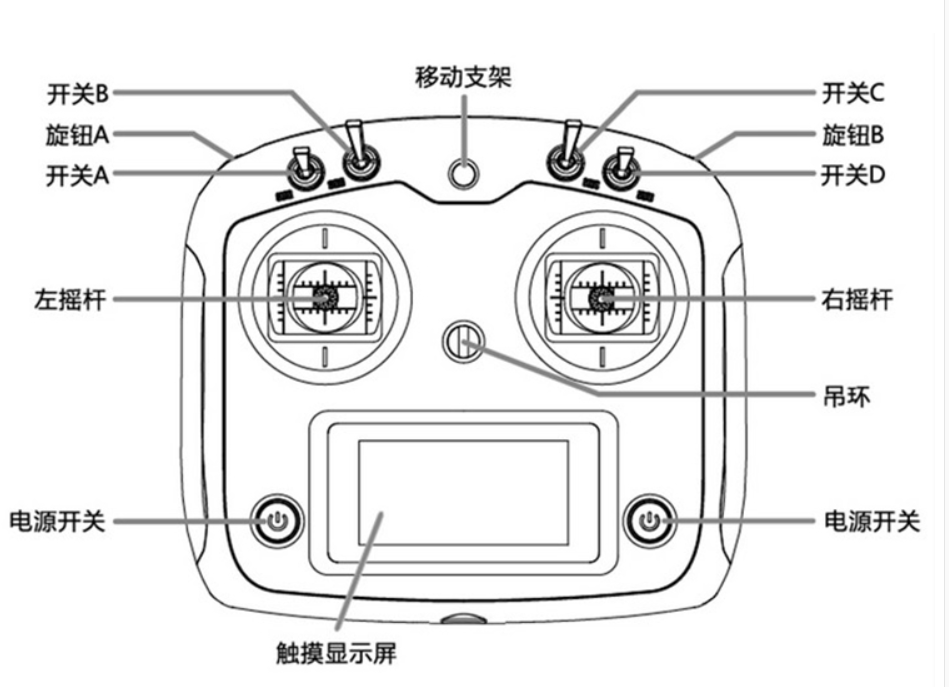
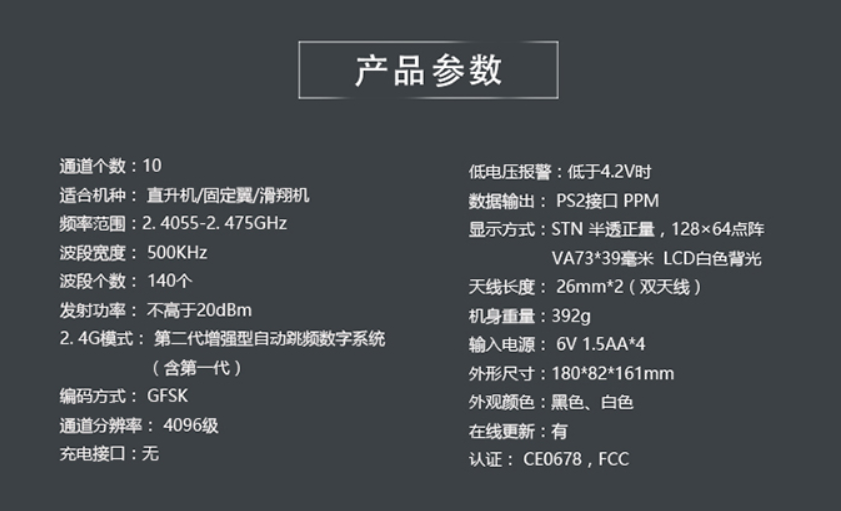
4.1硬件介绍¶






4.2 QGroundControl软件介绍¶
Tip
QGC各版本请手动下载 QGC官网 提取码: 1evo
4.2.1 QGC通信连接¶
连接有两种方法,数据线连接,wifi连接
- 数据线连接
用Micro USB插入飞控的数据口连接电脑,打开QGC即可自动进行连接
- wifi图传连接
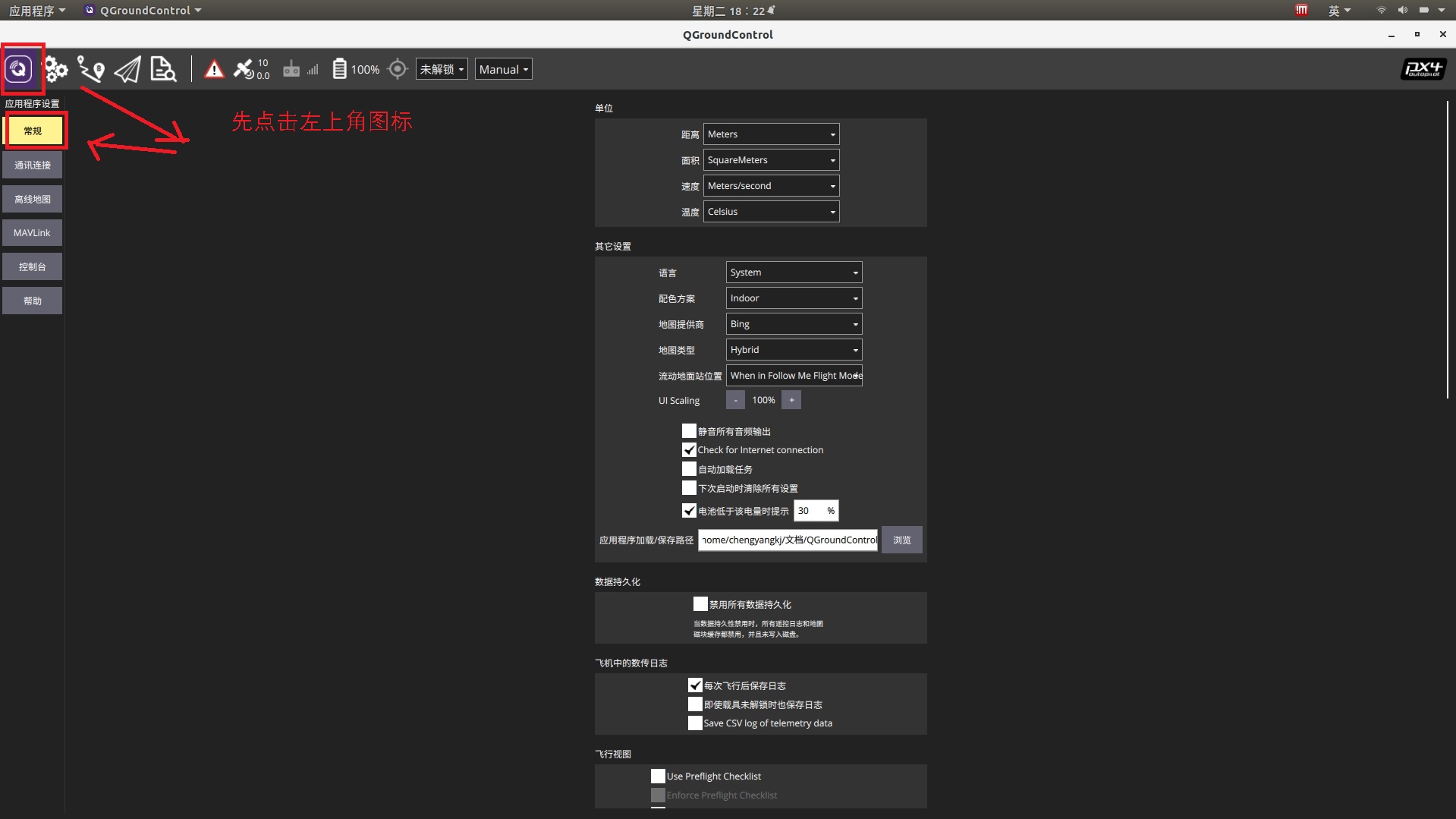
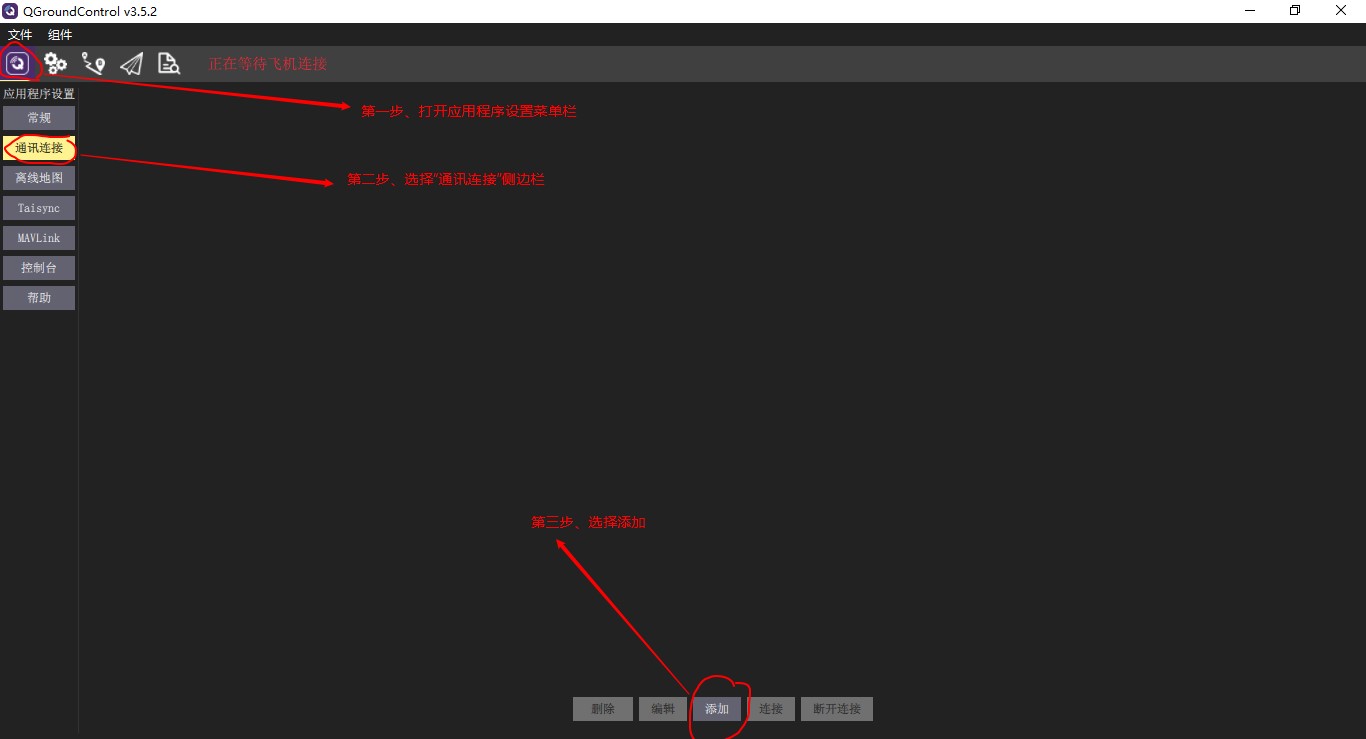
第一步是打开 应用程序设置 菜单栏;第二步是选择 通讯连接 侧边栏;下面会出现五个可修改功能按钮,分别为删除,编辑,添加,连接,断开连接.第三步是点击 添加 按钮.(此处图片为qgc的连接1~3)
第四步是在类型旁边将原有的类型serial重选为TCP.(此处图片为第四步)
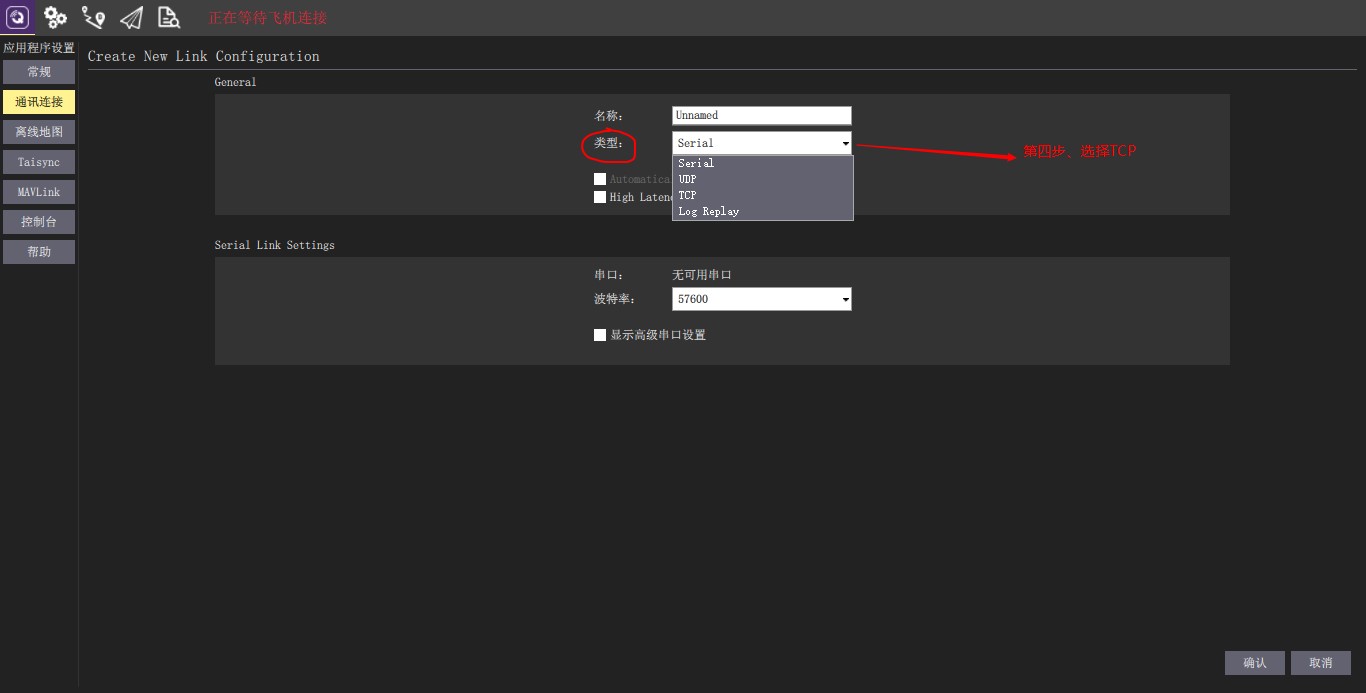
选择TCP类型之后,下面的输入框有所变化,主机地址就填写为192.168.10.76;端口号填写为6000,接着点击确认即可.(此处照片5~7)

第八步是选中刚才添加的通讯连接,第九步点击下面的连接按钮,进行连接到QGC.(此处照片为8~9)

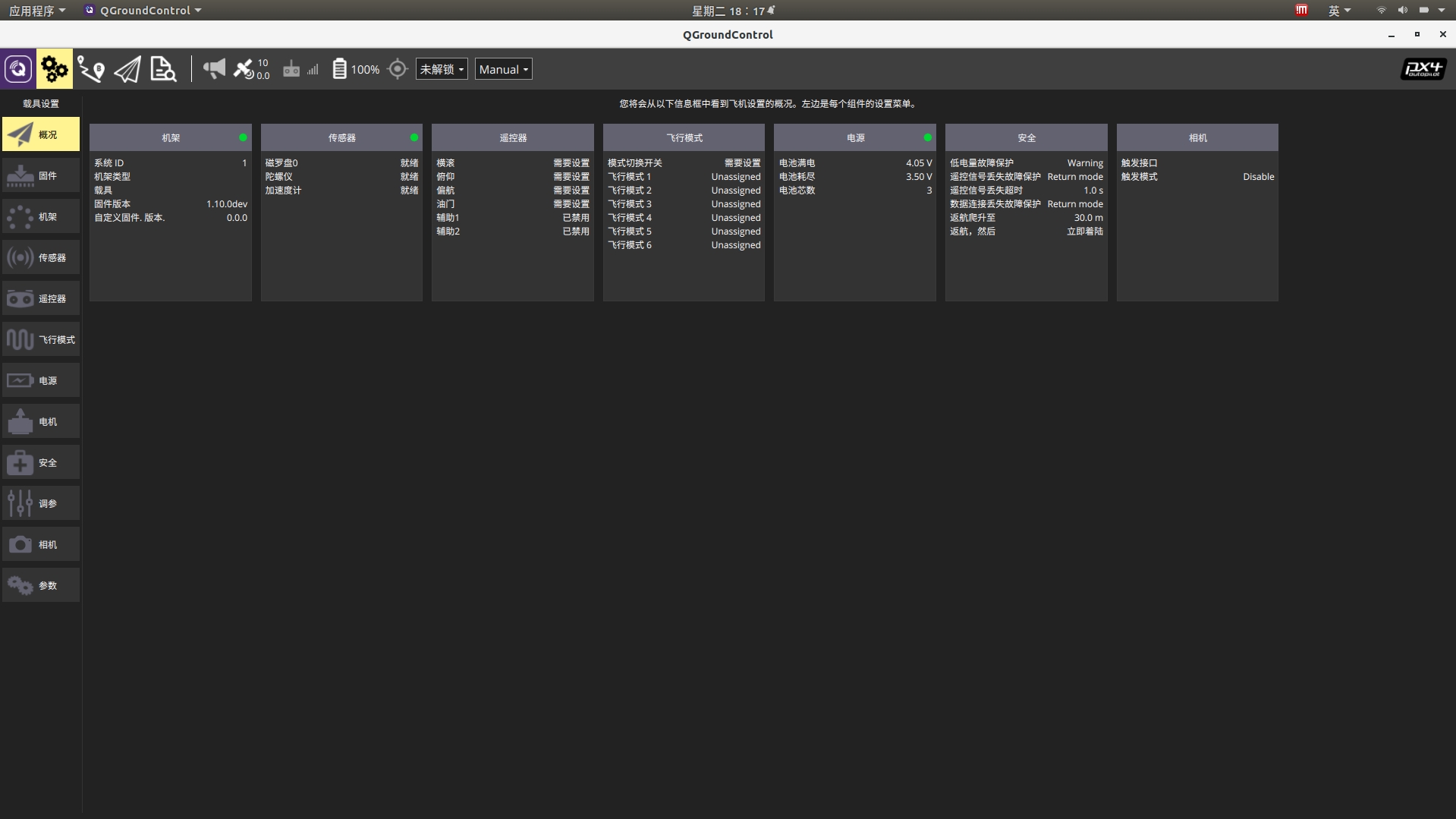
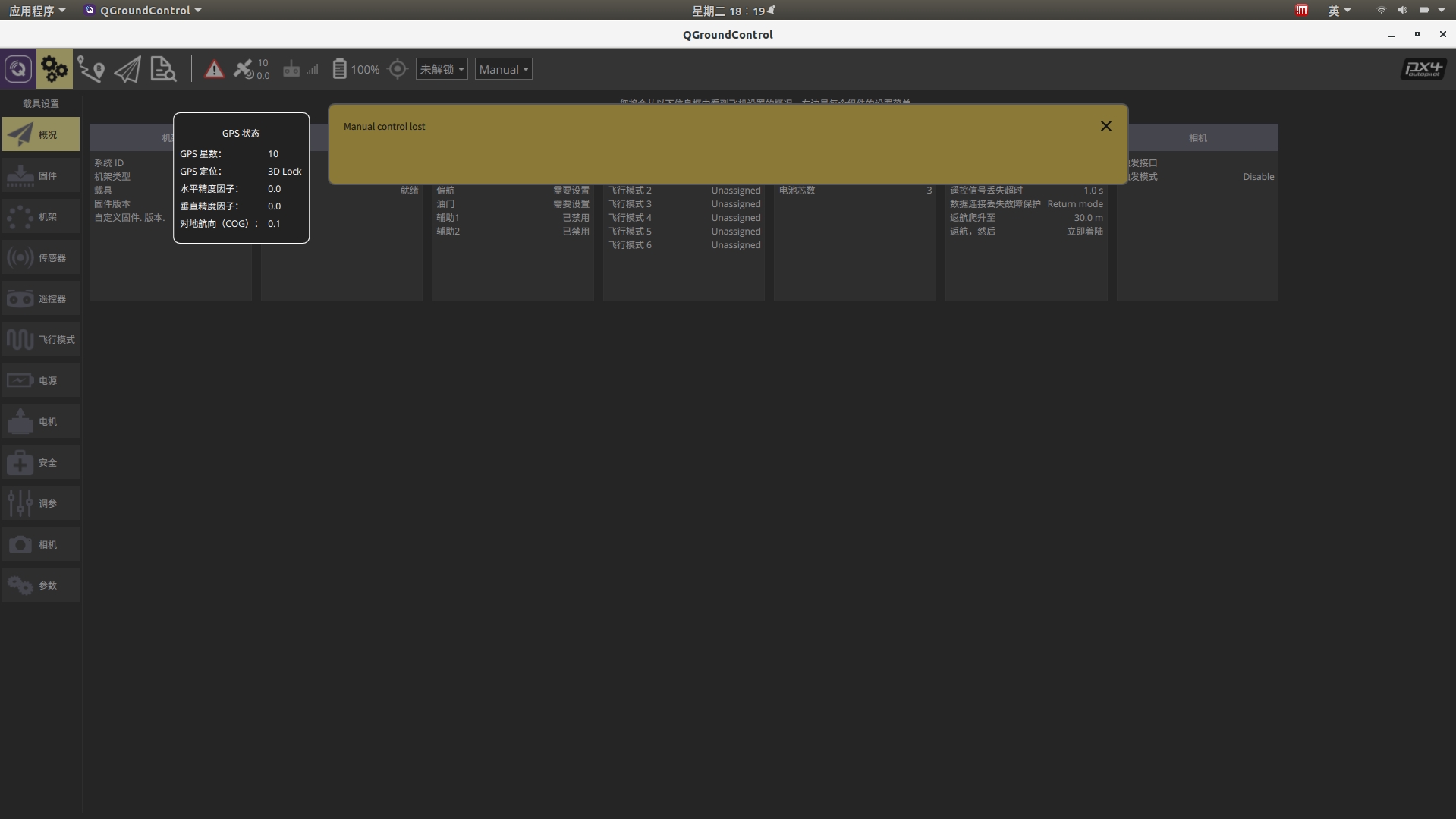
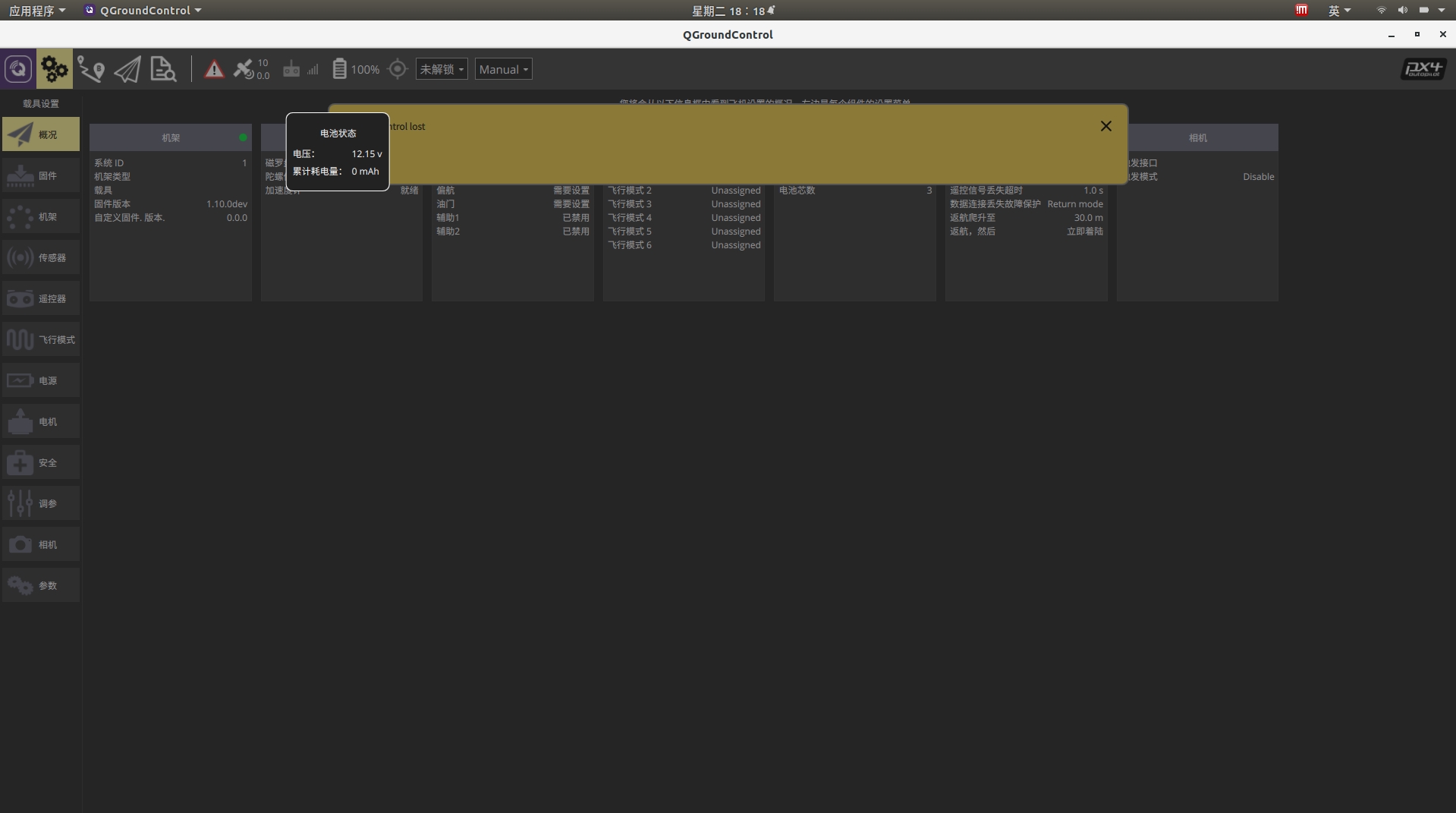
第十步就可以看到WIFI数传连接成功,地面站上显示飞控的各个信息.(此处照片为10)

Tip
关于QGC与飞机连接的详细配置,请查看第八章:无人机高级功能调试