自主飞行之进阶¶
1. 吊舱视觉跟踪¶
a. 吊舱连接¶
进行吊舱视觉跟踪测试前需要先确认吊舱是否连接
- 给飞机上电,启动飞机后,听到吊舱发出两段提示音则表示吊舱启动正常。
- 输入lsusb查看是否有image technology corp,有则继续,无则重新插拔USB或重启吊舱。

- 输入ls /dev | grep video,是否出现video0,有则继续,无则重新插拔。

4.打开Ubuntu自带软件Cheese,查看是否有图像:

b. 室内测试¶
- 在出去外场测试之前要先在室内测试吊舱各项功能是否正常,首先使用Nomachine连接TX2的远程桌面。
2. 接着运行如下目录的脚本文件: /home/amov/track_ws/src/px4_command/sh/sh_for_P200/fly_tracking_test.sh

- 会运行五个终端,依次检查每个终端是否有报错,这里第二个终端报错(打不开视频):
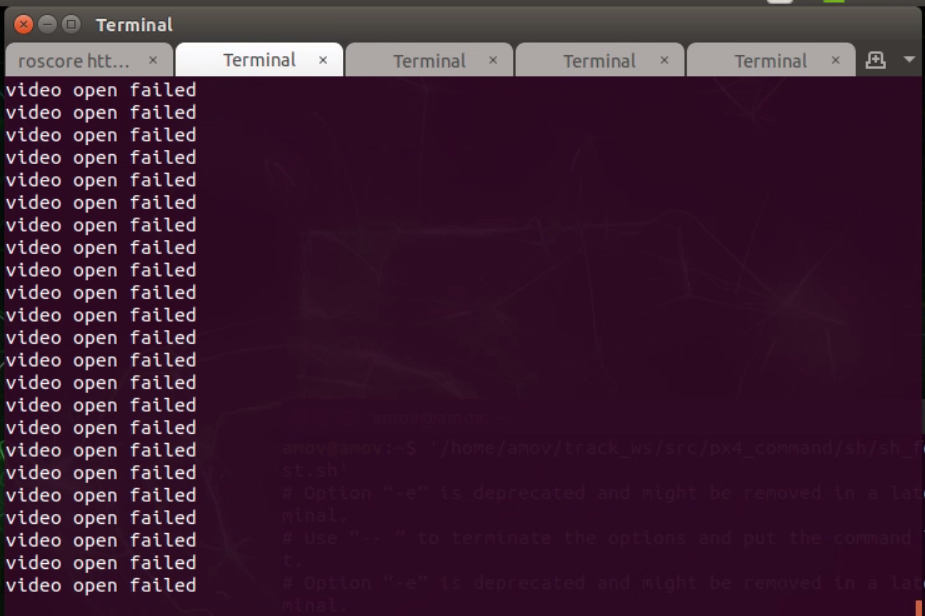
4. 请确保吊舱电源是否开启,并且吊舱的USB线插入TX2。通常在TX2上电后需要重启下吊舱,否者可能造成TX2连接不上吊舱, 按压吊舱电源键重启吊舱:

- 再次运行脚本,运行成功:

- 框选一个物体,测试吊舱是否能够跟踪:

c. 室外测试¶
室外测试需要使用NoMachine连接TX2的远程桌面,同时在TX2上框选要跟踪的目标
- 在完成初步测试之后,让飞手在自稳模式或定点模式下试飞飞机,飞机正常则返回地面继续下面步骤
- 启动fly_track_outdoor.sh文件
/home/amov/track_ws/src/px4_command/sh/sh_for_P200/fly_tracking_outdoor.sh
- 观察各个终端,确保都没有错误
- 在倒数第三个终端窗口输入0选择PID,输入1选择GO ON

- 在倒数第二个终端窗口输入1选择go on,输入777选择track

- 飞手尝试切换offboard模式,能切换成功则在position模式下飞到一定高度。
Tip
飞机在offboard模式进行视觉跟踪,在起飞前一定要确保能切换到offboard模式
- 框选目标观测速度数据是否正常,正常则继续
框选目标:

观察数据是否正常: .. image:: ../images/Outdoor_test3.png

- 飞手切offboard模式飞机开始跟踪,并注意在意外情况下控制飞机切到自稳或者定点模式。
Tip
演示及教学视频 铂贝学院