图传配置及吊舱的使用¶
9.0 说明¶
Tip
我们的数传设备有两种,一种是WIFI数传,一种是图数传,如果是WIFI数传请看9.2节,如果是图数传请看9.1节
9.1 图数传配置¶
9.1.0 说明¶
您购买收到的图数传地面端和图数传移动端(飞机端),默认已经按照背面的IP配置连接成功,可以跳过9.1.1节和9.1.2节进行测试。
如果意外更改或其他原因,导致图数传地面端和图数传移动端连接不成功,可以按步骤依次配置。
Tip
图数传的配置工具请在百度网盘自主下载 网盘链接 提取码: 1evo
图数传模块:

9.1.1 地面端图数传设置¶

发货前我们默认会将地面端配置为AP模式,其中地面端图数传会创建一个wifi热点。 通常我们配置的默认wifi名称为:amov-01,密码为:123456789 (此热点电脑搜索不到,仅图数传可搜索)
硬件连接¶
使用网口转GH1.25 4P线连接地面端LAN口与电脑网口


使用4s电池进行供电。使用XT30转GH1.25 4P线连接地面端图数传与4s电池。如下图所示。
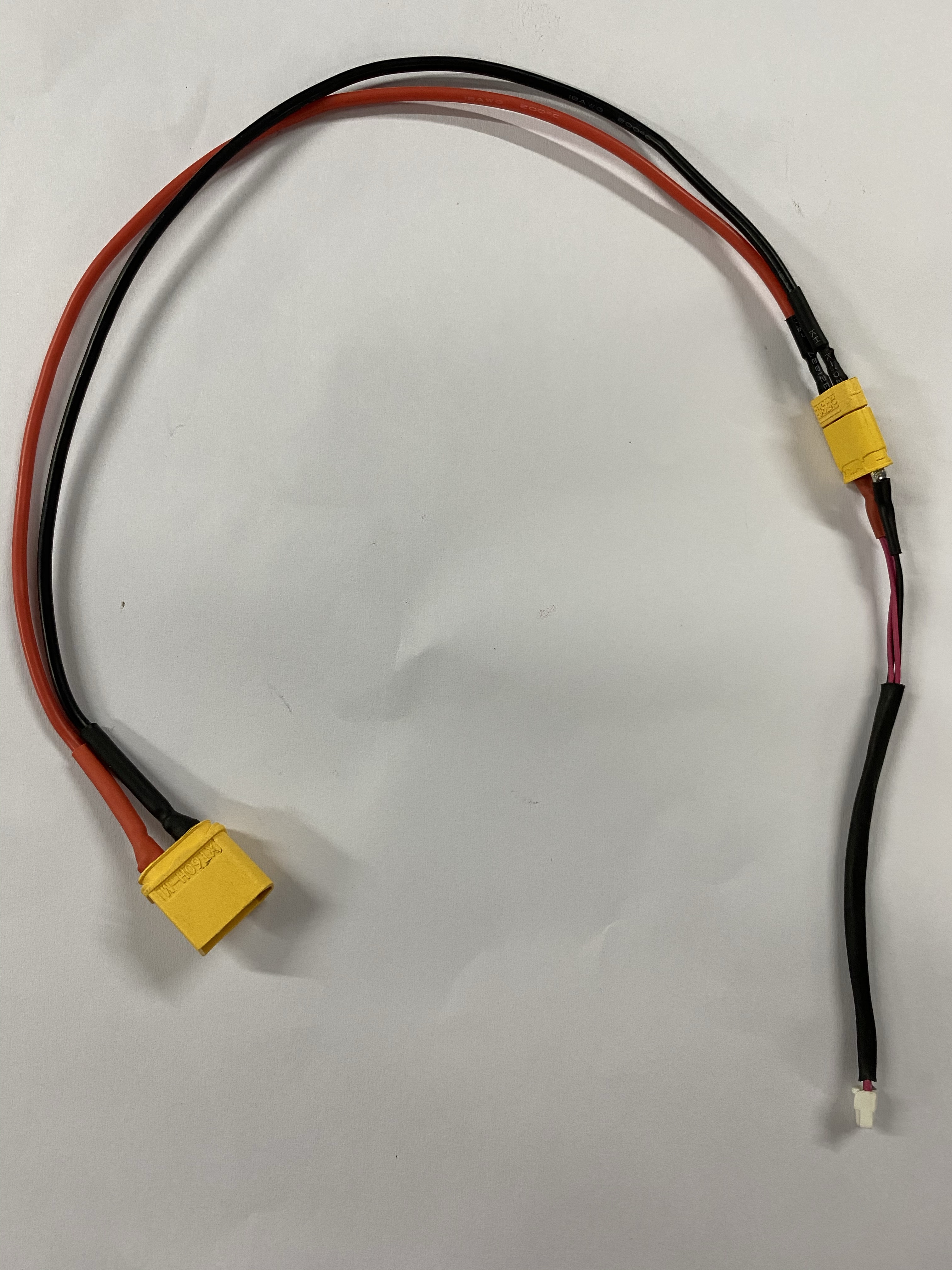

整体接线如下:

Warning
请勿将电源线接入网口或串口,否者可能造成您的设备损坏。
软件配置¶
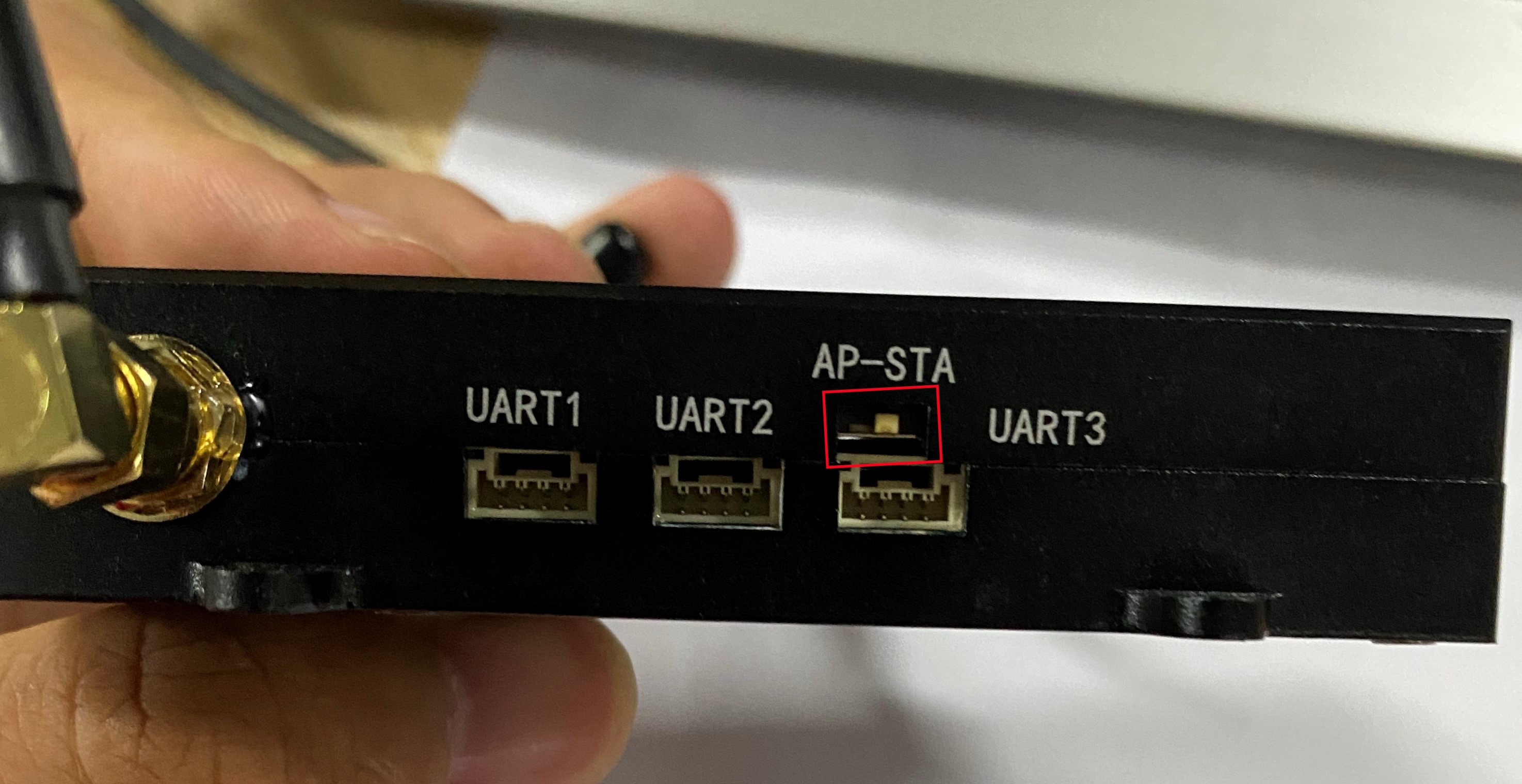
通电前将地面端图数传UART3(串口3)上面的开关拨到左侧(AP模式)。请勿随意拨动开关,否则可能造成配置混乱。

- 配置电脑静态IP
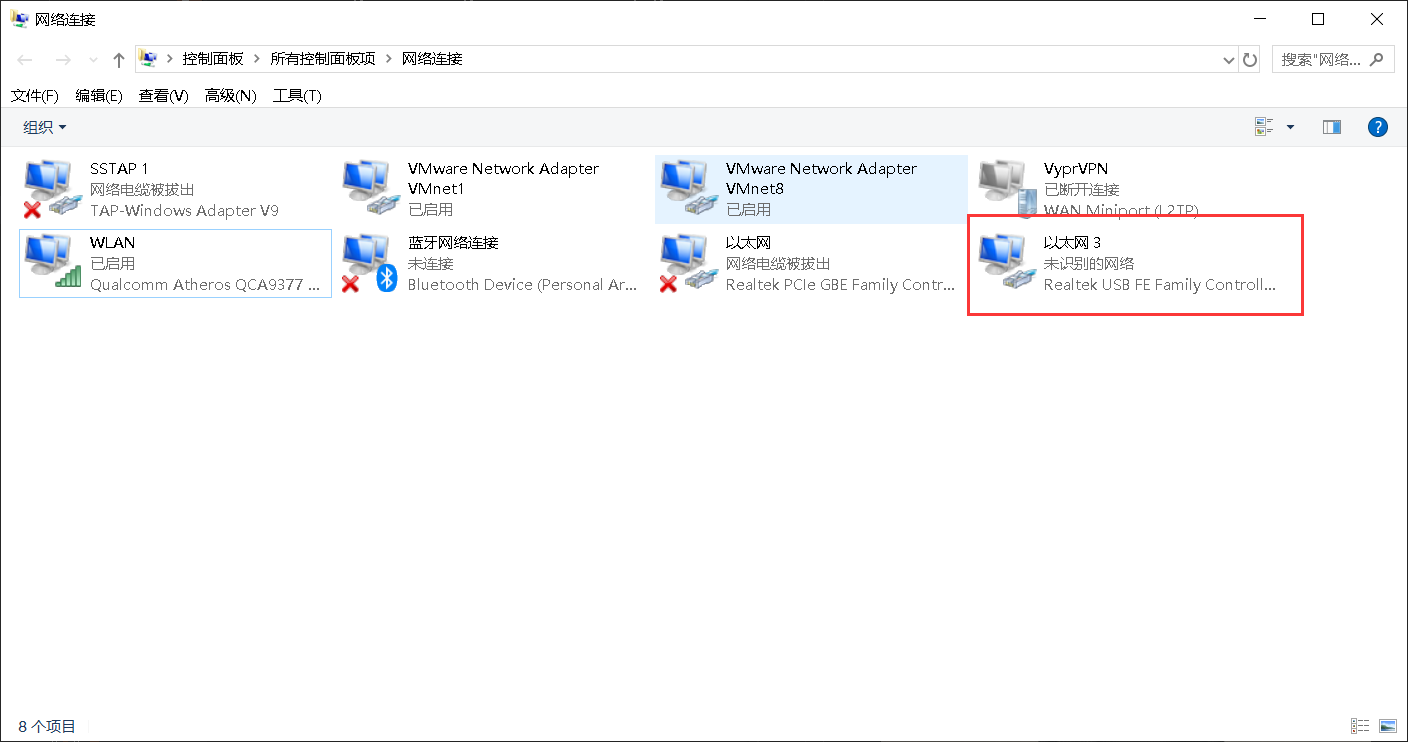
按照接线将地面端上电并连入电脑网口,关闭电脑WIFI,打开网络链接,双击以太网:
在属性->找到IPV4选项并双击:
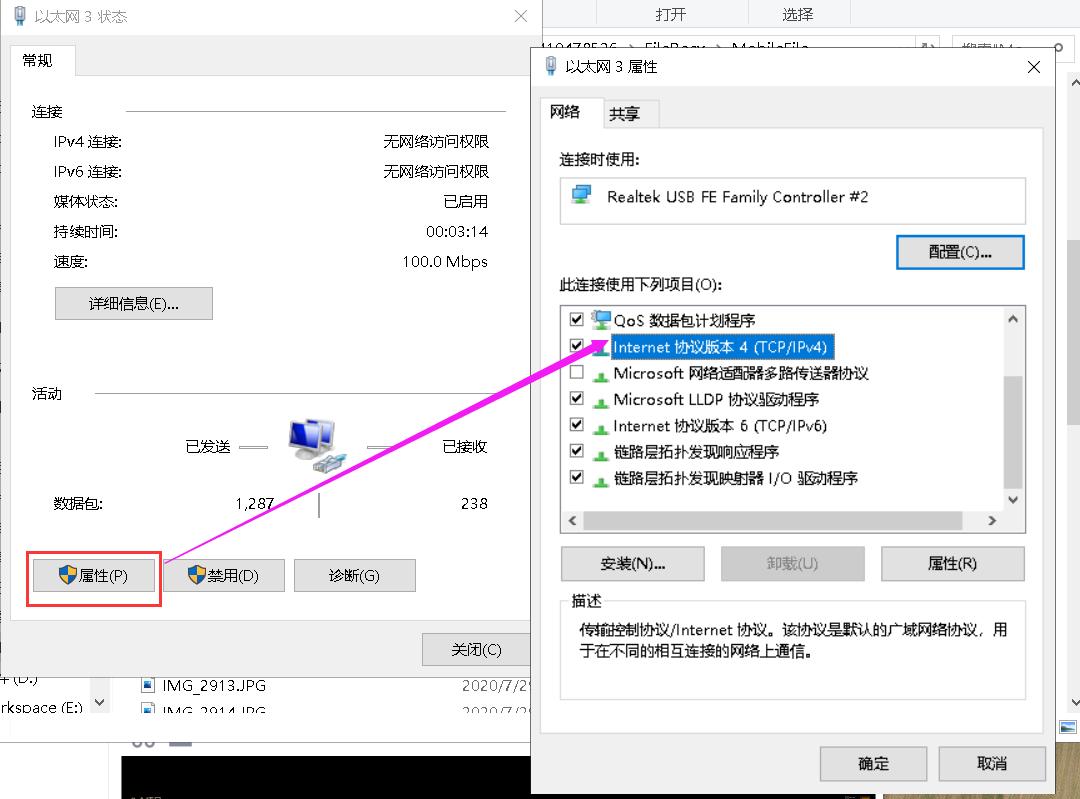
配置静态IP为192.168.1.x,子网掩码为255.255.255.0,网关为192.168.1.1:

设置完成后依次点击每个窗口的确定按钮进行关闭。
- 配置图数传串口
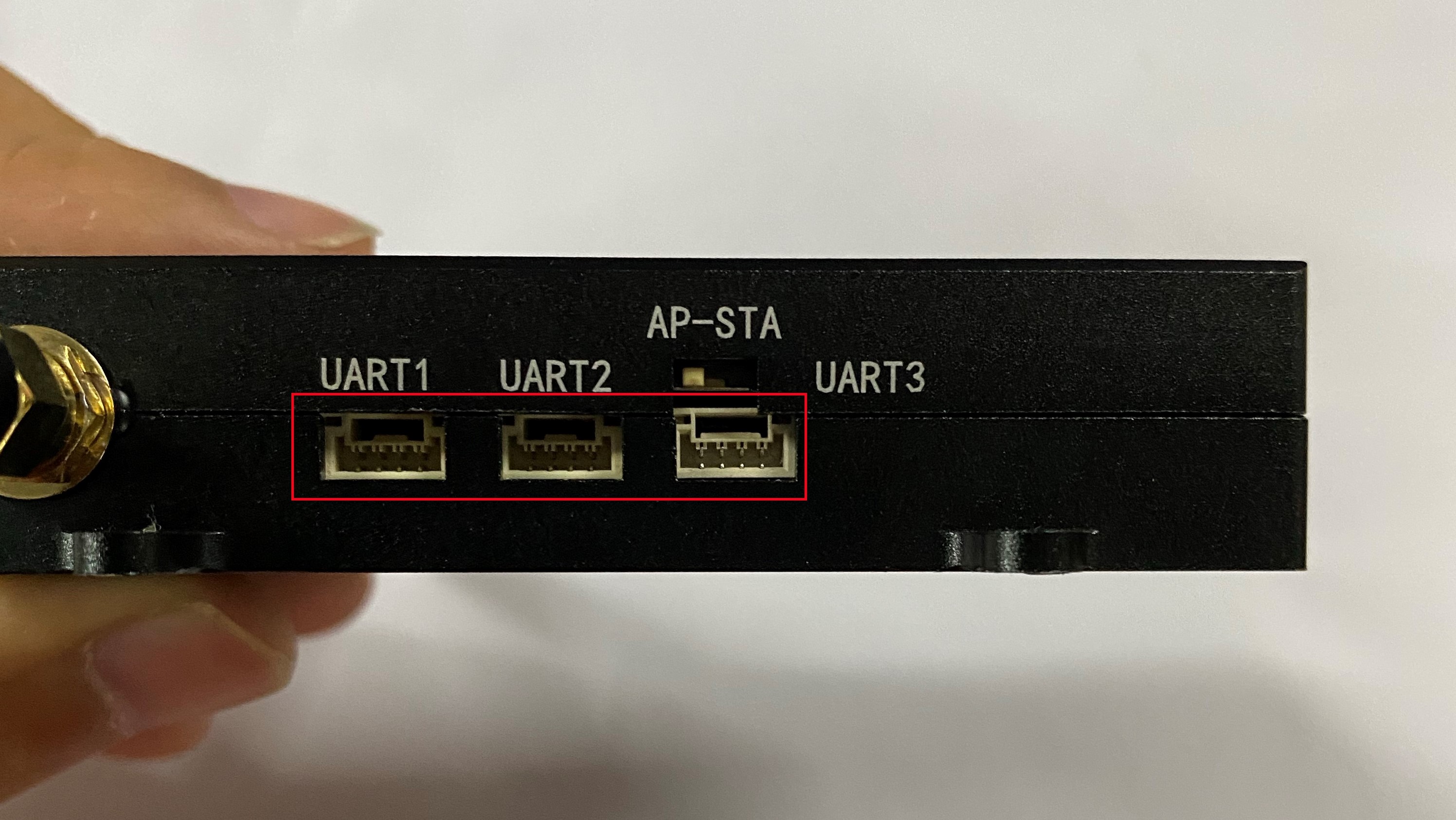
图数传模块有三个串口,如果要使用这些串口,就需要在配置软件中进行配置。
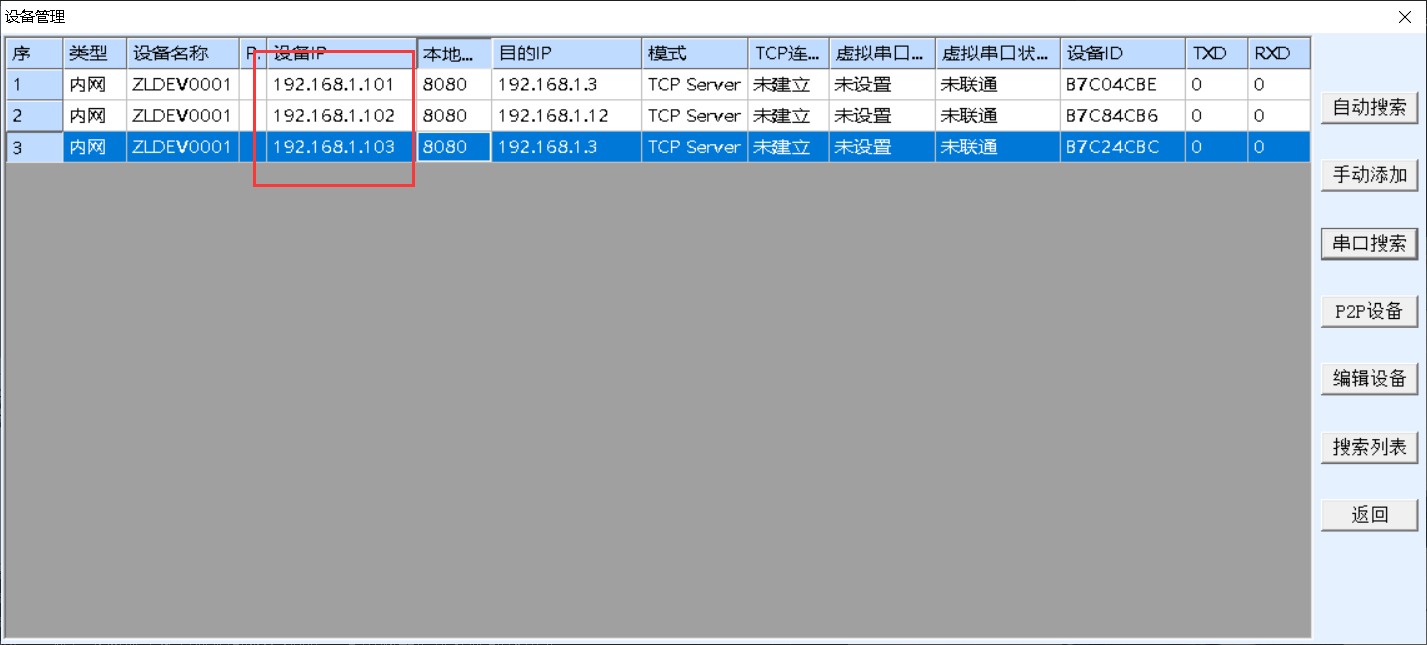
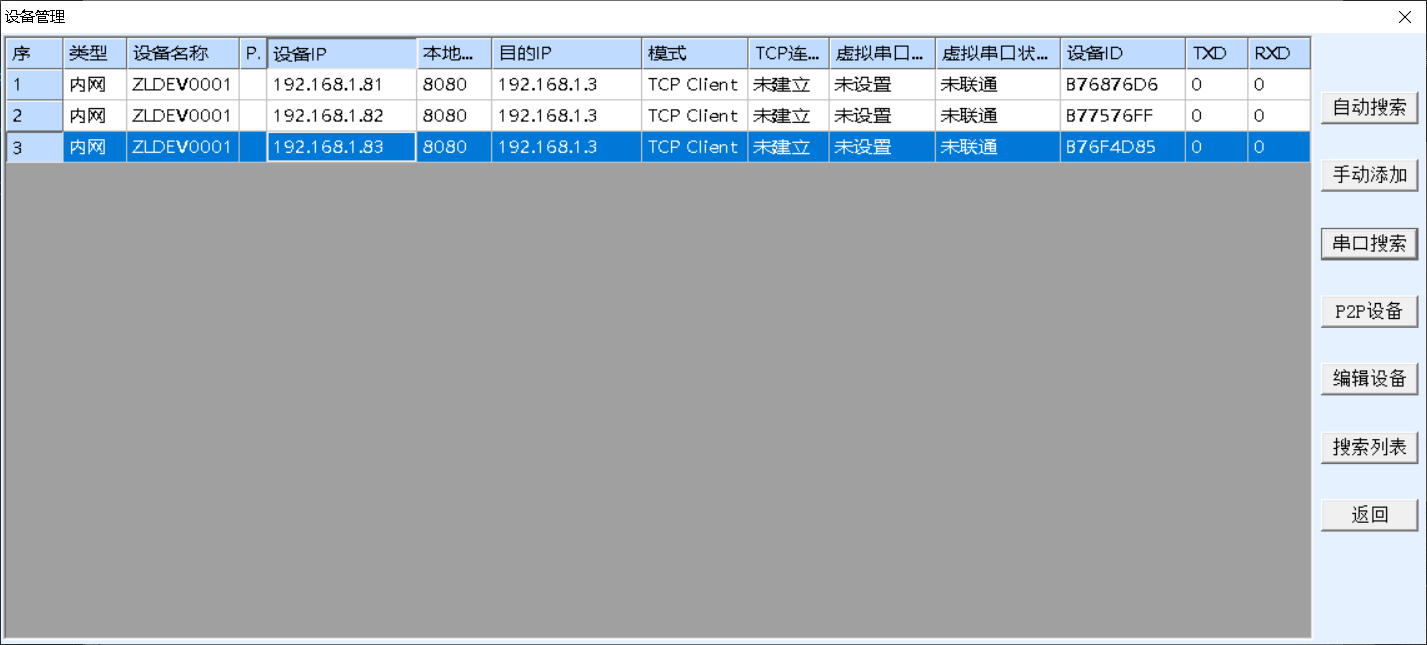
打开网盘中提供的配置软件(ZLVirCom5.42.exe)。点击设备管理:

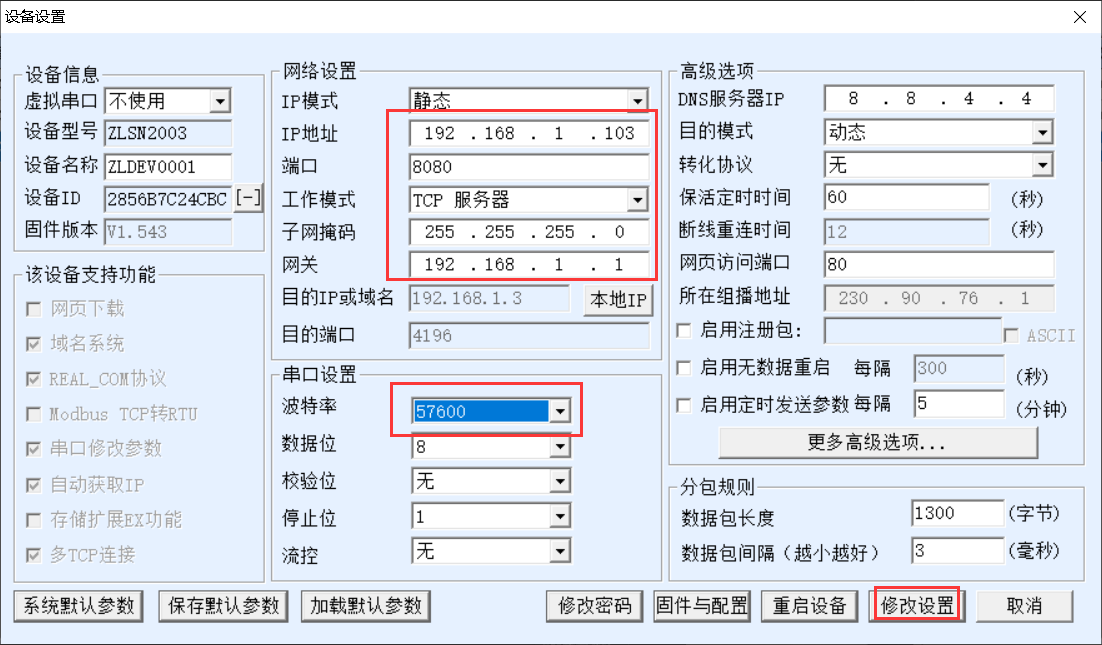
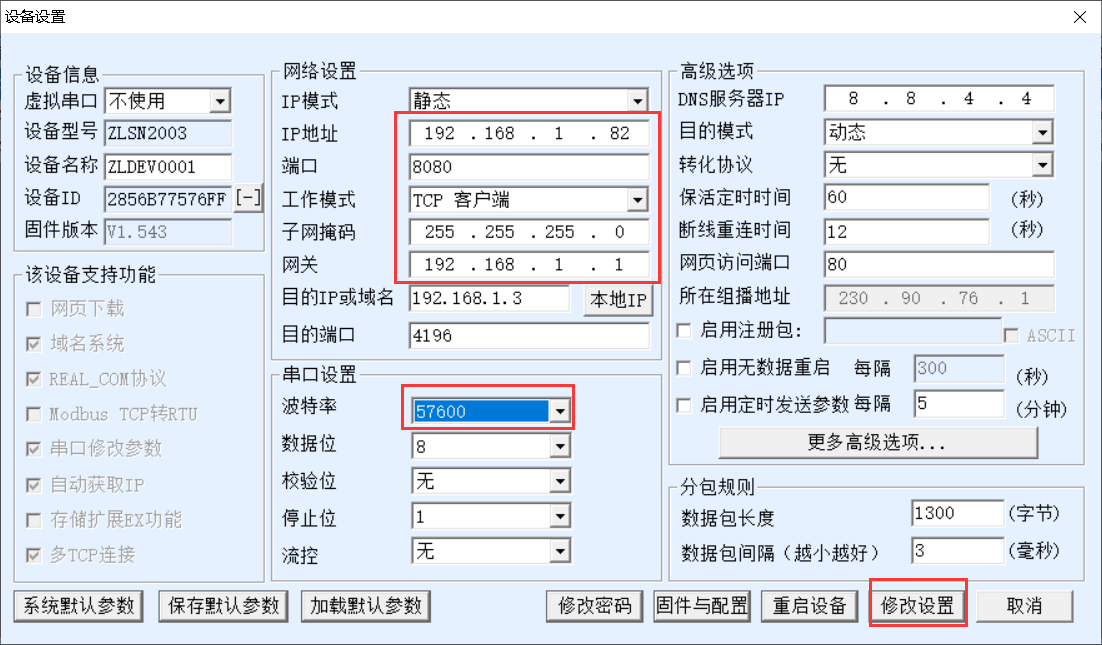
配置每个串口的IP以及波特率等信息:
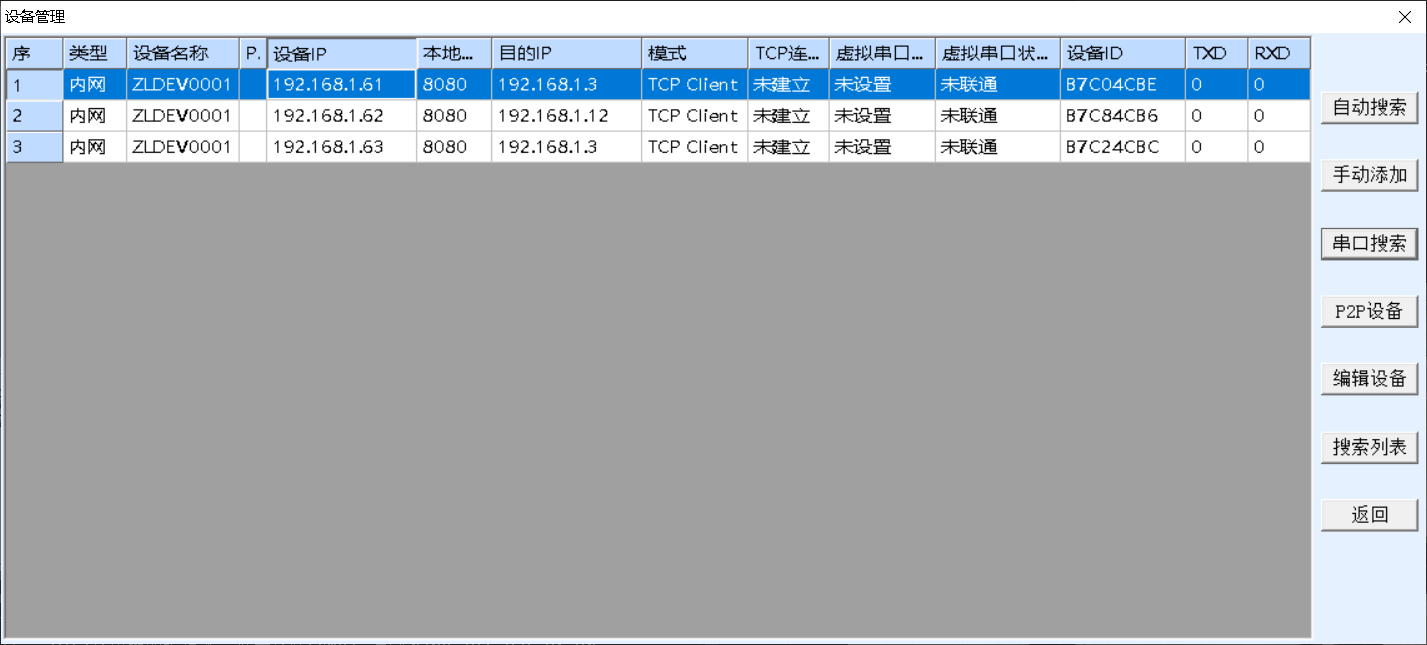
这里对UART1(串口1)的配置如下图所示:

UART2(串口2):

UART3(串口3):
配置之后点击修改设置即可,配置之后显示如下:
- 配置图数传WIFI
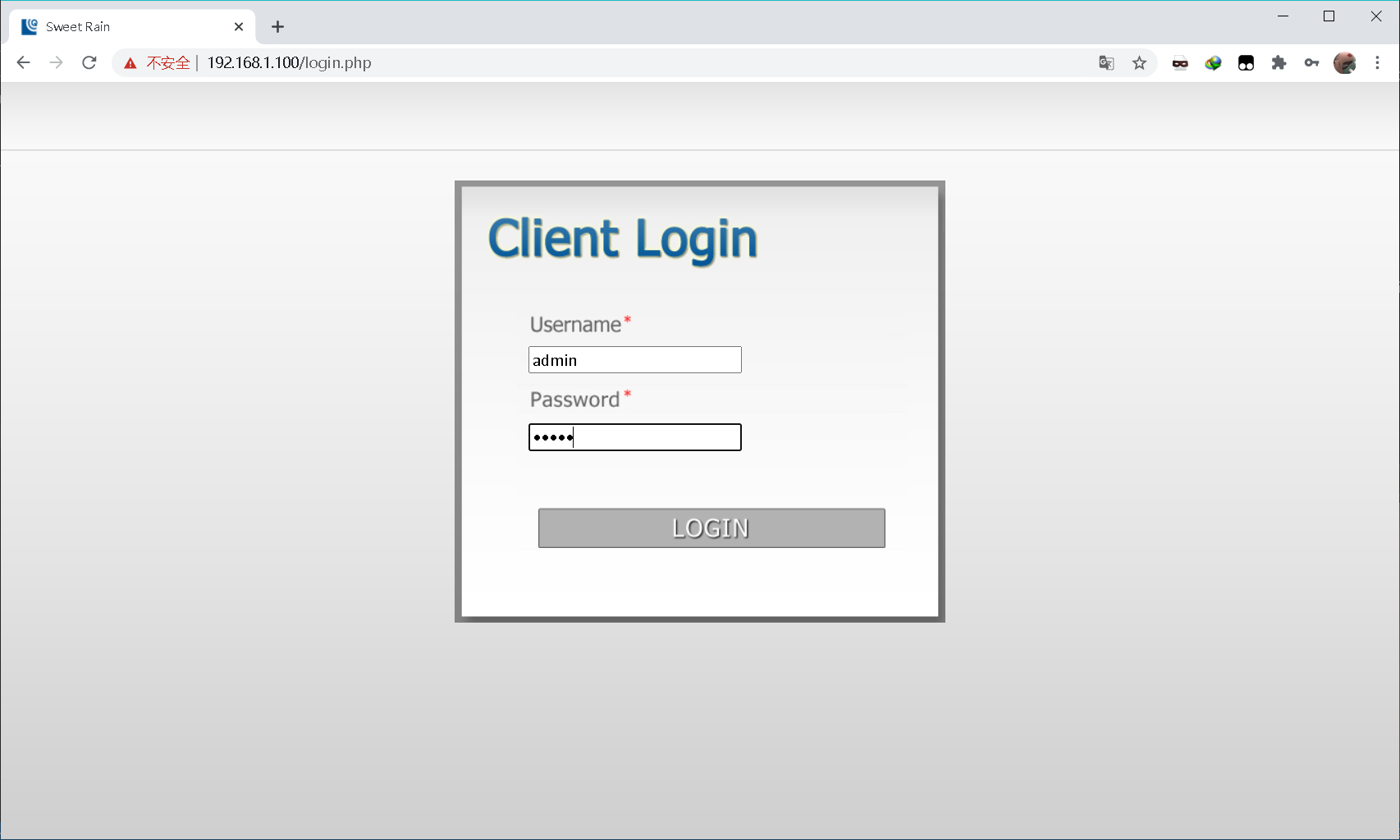
根据图数传底下提供的IP,在浏览器地址栏输入该IP(一般地面端AP模式的IP均为192.168.1.100):

进入配置网页进行登陆,用户名密码均为admin:
登陆后可以看到当前模式为AP模式。点击Wireless:
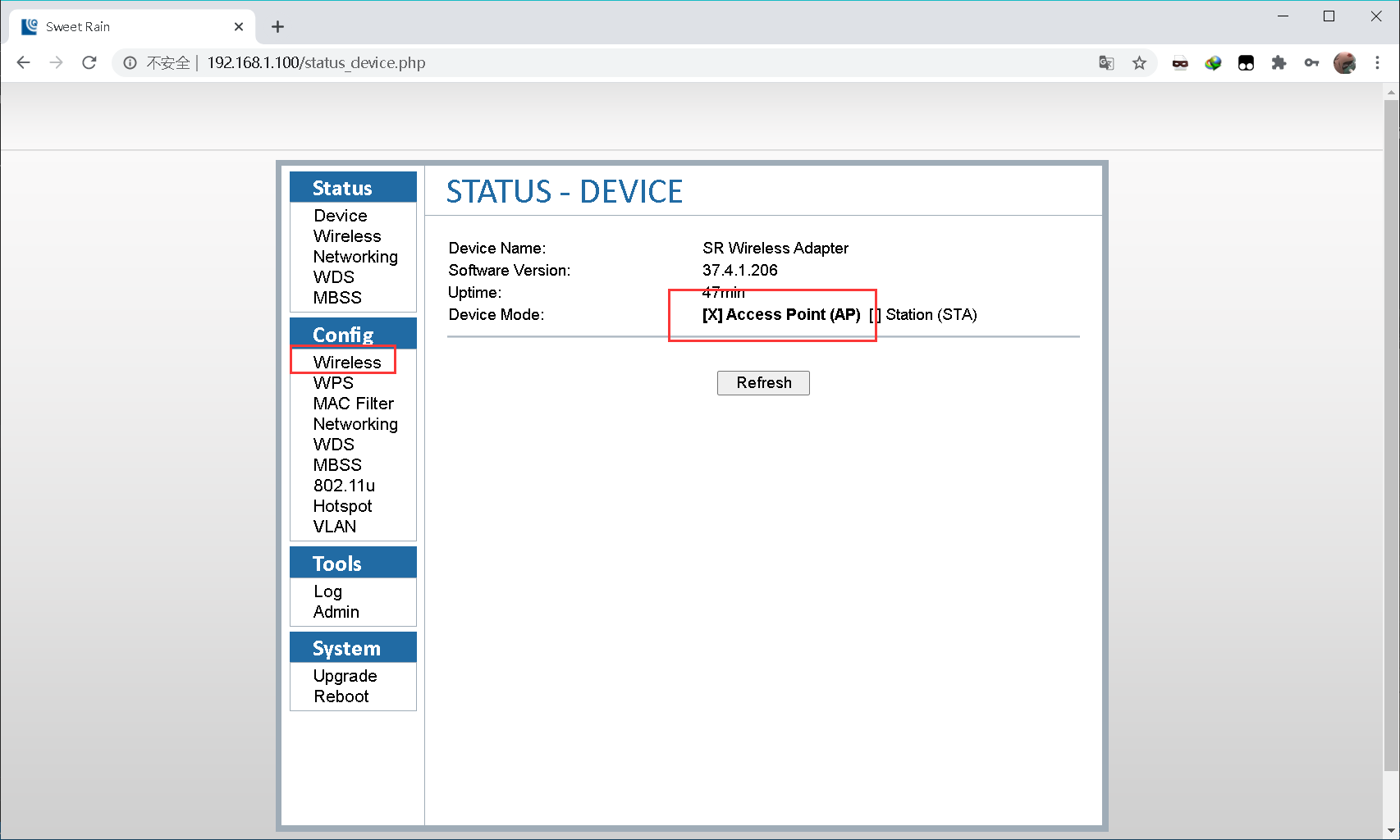
设置WIFI以及密码:

之后点击Save保存。
9.1.2 飞机端图数传设置¶

飞机端图数传在我们发货前也会默认配置为无线STA模式,并且连接上地面端的wifi。 通常您拿到手的图数传已经是配置好的。
硬件连接¶
同地面端
软件配置¶
通电前将飞机端图数传UART3(串口3)上面的开关拨到右侧(STA)。
- 配置电脑静态IP
同地面端
- 配置图数传串口
图数传模块有三个串口,如果要使用这些串口,就需要在配置软件中进行配置。
打开网盘中提供的配置软件(ZLVirCom5.42.exe) 点击设备管理:
配置每个串口的IP以及波特率等信息:
这里我配置UART1(串口1)为如下:

UART2(串口2):
UART3(串口3):

配置之后点击修改设置即可,配置之后显示如下:
- 配置图数传WIFI
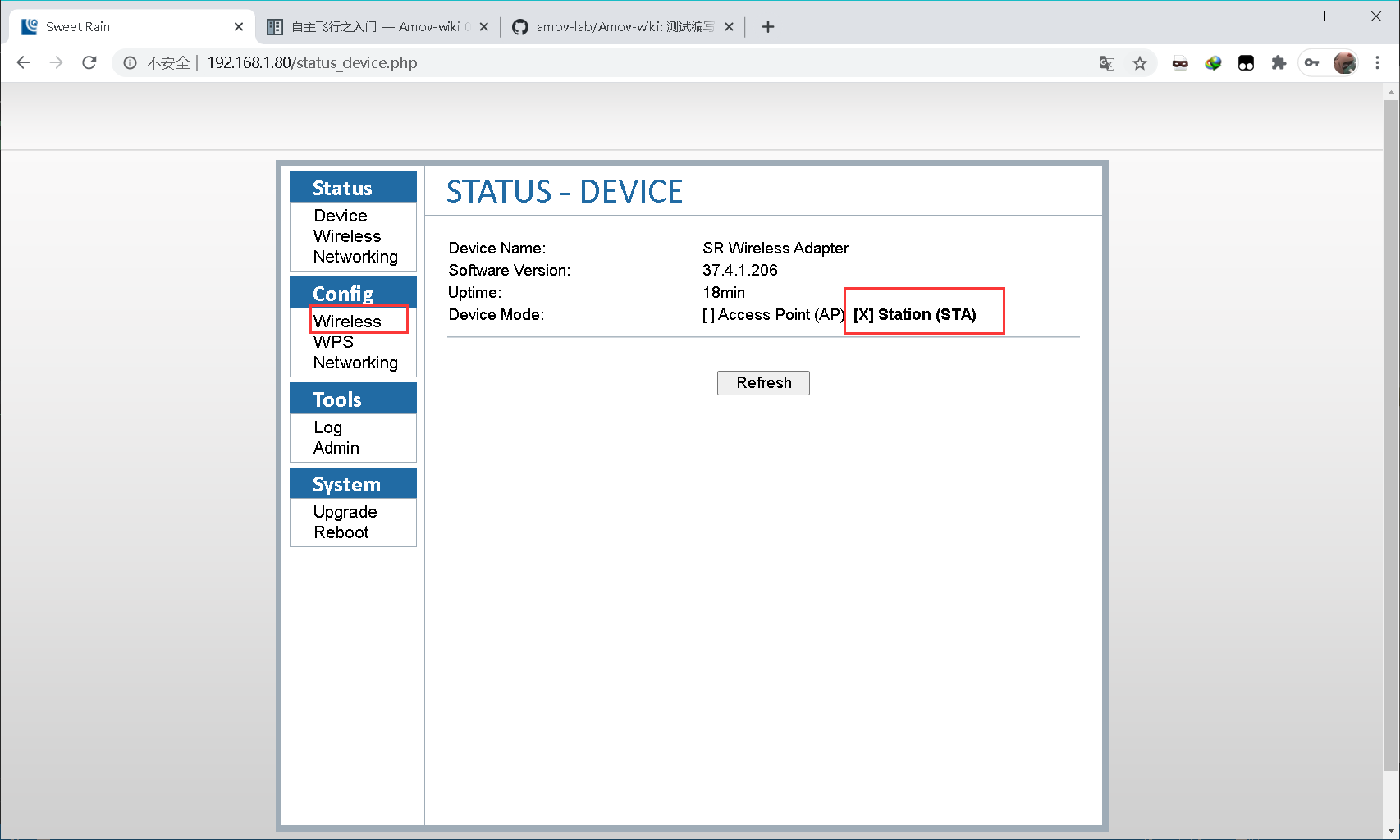
根据图数传底下提供的IP,在浏览器地址栏输入该IP。当图数传在STA模式下,如果该设备上贴有数字xx,则该设备的IP为192.168.1.xx。 例如,该设备贴有数字80,则该设备的IP为192.168.1.80。

进入配置网页进行登陆,用户名密码均为admin:
登陆后可以看到当前模式为STA模式,点击Wireless:
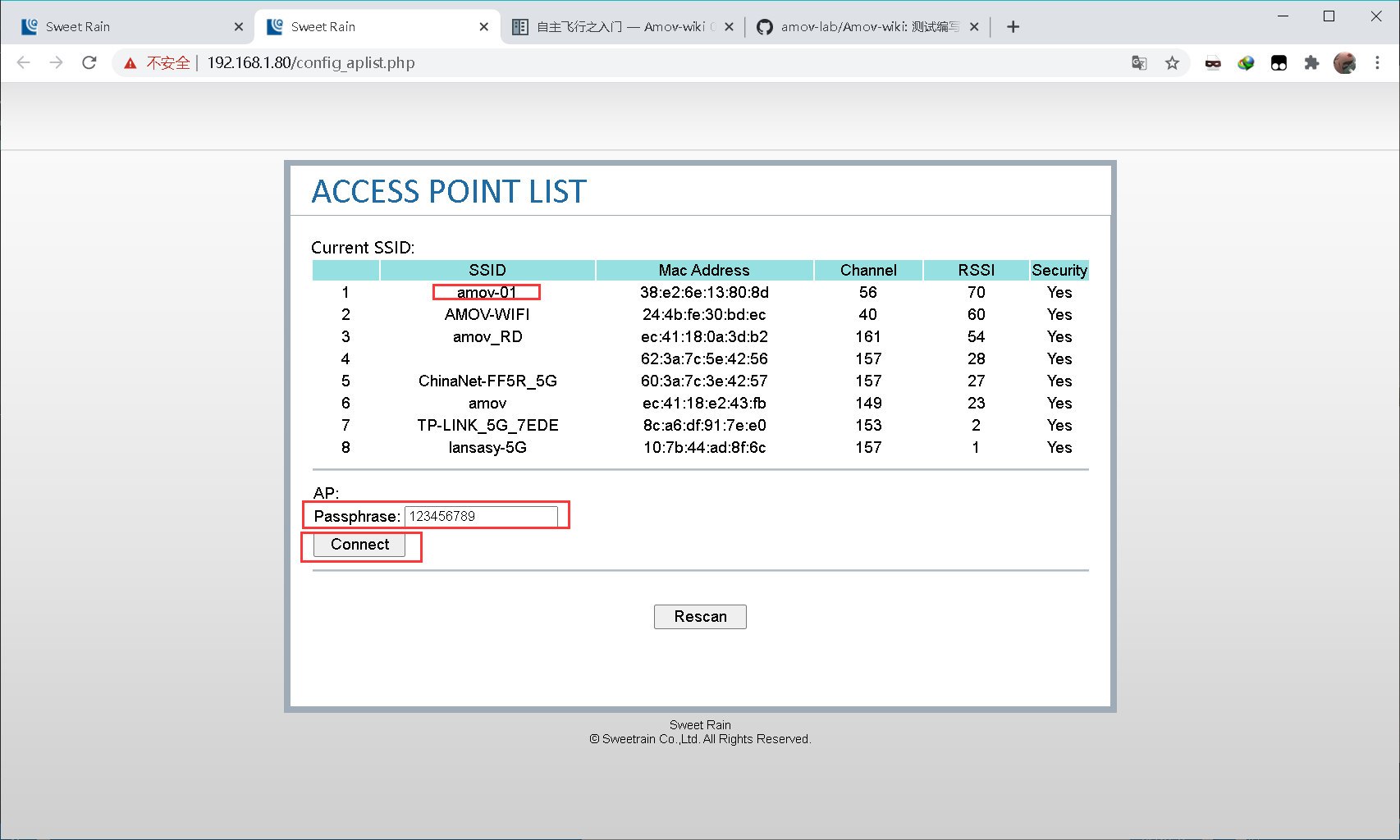
选择Scan扫描Wifi:

将地面端上电,并选中地面端WIFI填入密码,点击Connect:
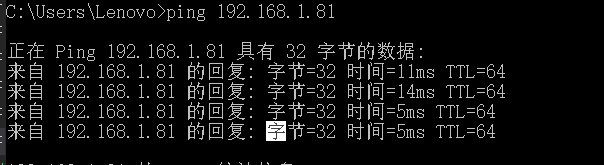
接下来测试是否配置成功:重启图数传地面端和飞机端,假设你配置成功, 那么飞机端图数传会自动连接地面端图数传。那么我们将笔记本连接上地面端网口, 打开终端(cmd),分别ping 192.168.1.80,192.168.1.81,192.168.1.82,192.168.1.83 尝试ping一下我们的飞机端图数传的几个串,都ping通了,那么恭喜你搞定了, ping不通那么你需要打开需要检查上面的配置是否有错误。
9.2 WIFI数传配置¶
9.2.1 WiFi数传两种配置模式¶
根据WiFi-LINK配置模式有两种连接方式:一种是无线AP模式,另外一种无线网卡模式.出厂默认配置为AP模式,如需配置为无线网卡模式,可按照无线网卡模式说明文档自行配置

这是我们发货时的默认配置,其中WiFi-LINK模块相当与一个热点,笔记本2要连接这个热点进而连接QGC. 他们配置详细步骤请看WIFI数传远程连接QGroundControl非正常连接篇
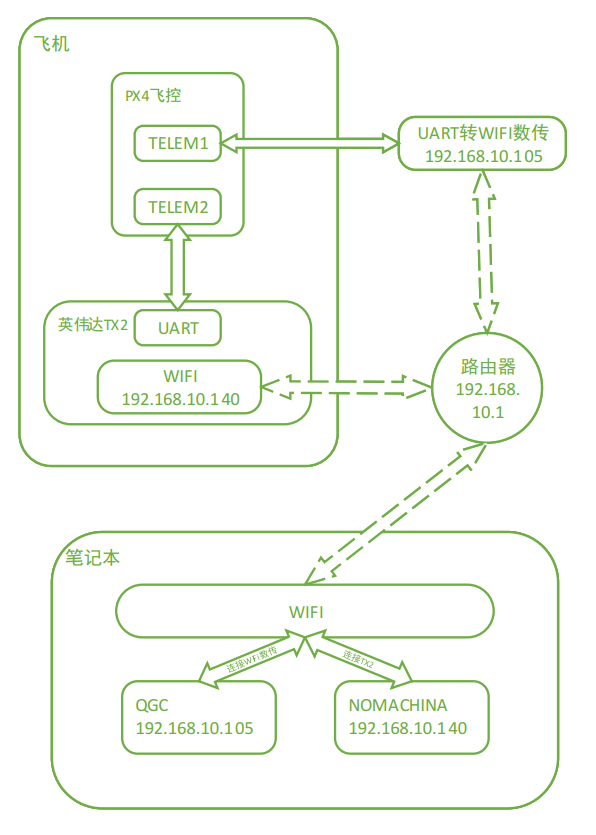
路由器设置
如图为无线WiFi路由器,其默认IP地址为192.168.10.1, 登录到此路由器的后台,用已连接此WiFi的手机或电脑 登陆地址wifi.wavlink.com(默认密码为admin)。
WIFI设置:设置WiFi的名称(此名称会在数传设置中用到) 加密方式选择WPA2-PSK


WiFi数传设置
- 硬件连接
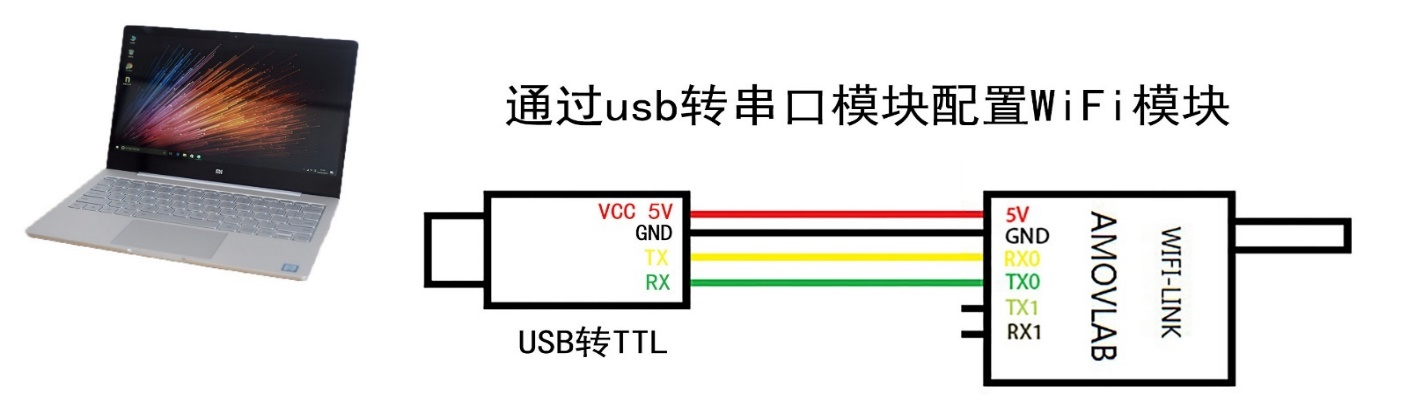

可用四根杜邦线连接usb转TTL与WiFi-LINK,下图是线序

- 软件配置
打开配置软件RM08K config tool CN V2.1.exe
选择相应的COM口使用一个细长的金属棒或者牙签点击WiFi数传 模块的reset按钮(模块上远离天线的那个孔),然后点击搜索 模块按钮,软件显示如下(Found Device at COMX(57600)) 说明连接成功。

然后下图所示配置你们的WiFi数传,其中网关要选择你的路由器 的网段,网络名称及密码设置你的WiFi路由器的名称与密码, 其中加密方式选择WPA2_AES。
设置完成后点击提交配置即可。
接下来测试是否配置成功:重启WiFi数传,假设你配置成功, 那么WiFi数传会自动连接WiFi路由器。那么我们用连接此 WiFi路由器的笔记本,打开终端(cmd),输入ping 192.168.10.105 尝试ping一下我们的WiFi数传,ping通了,那么恭喜你搞定了, ping不通那么你需要打开 RM08K config tool CN V2.1.exe 重新配置一下,可以点击查询配置,看看配置的是否有出入。

9.3 吊舱使用¶
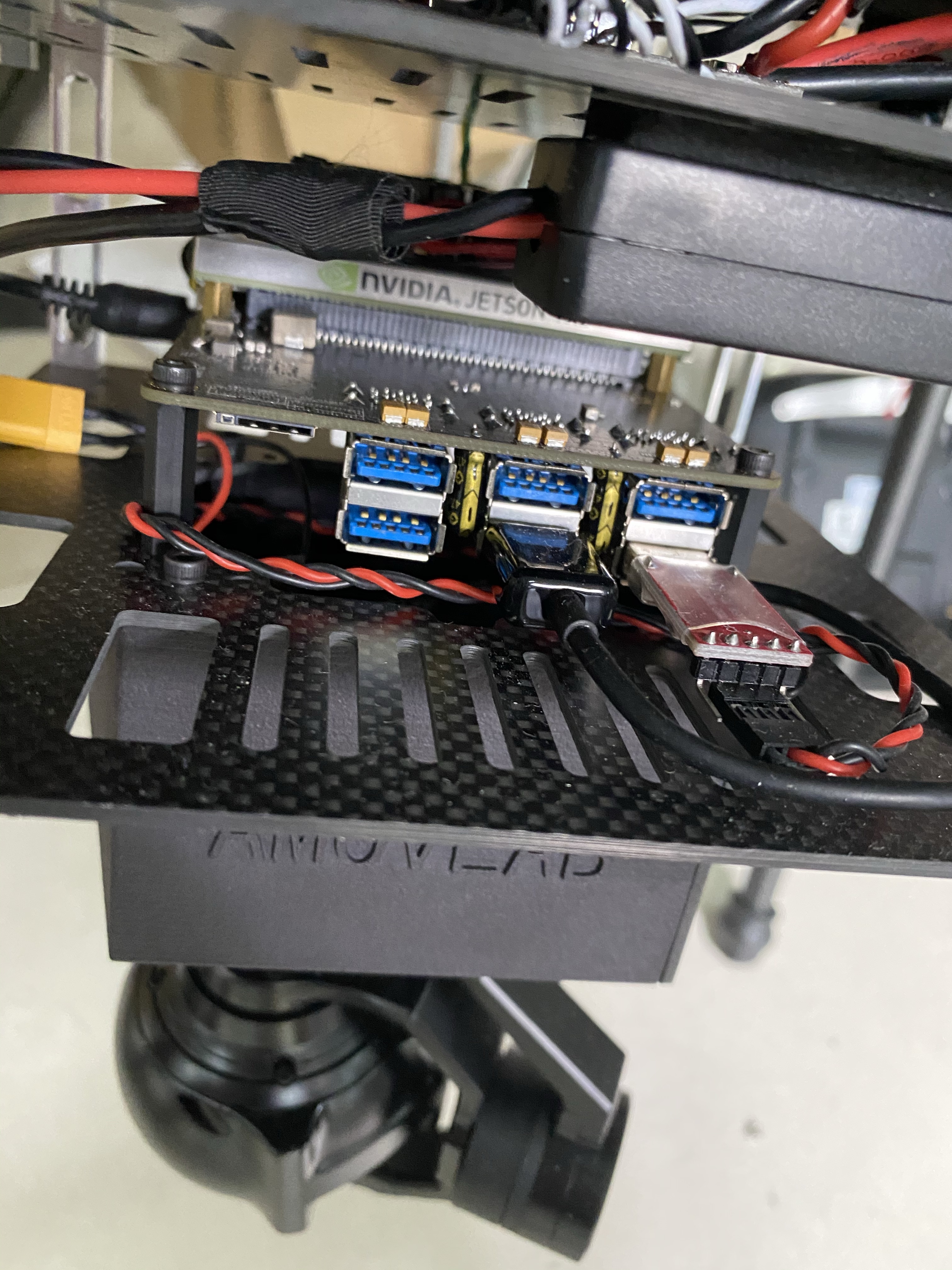
我们通过局域网,使TX2和自己的笔记本电脑连接同一个WiFi,查看TX2的IP地址,首先需要无限键鼠, HDMI转接线,显示器一台,4s电池,TX2供电线,吊舱供电电池3s。
远程连接TX2¶
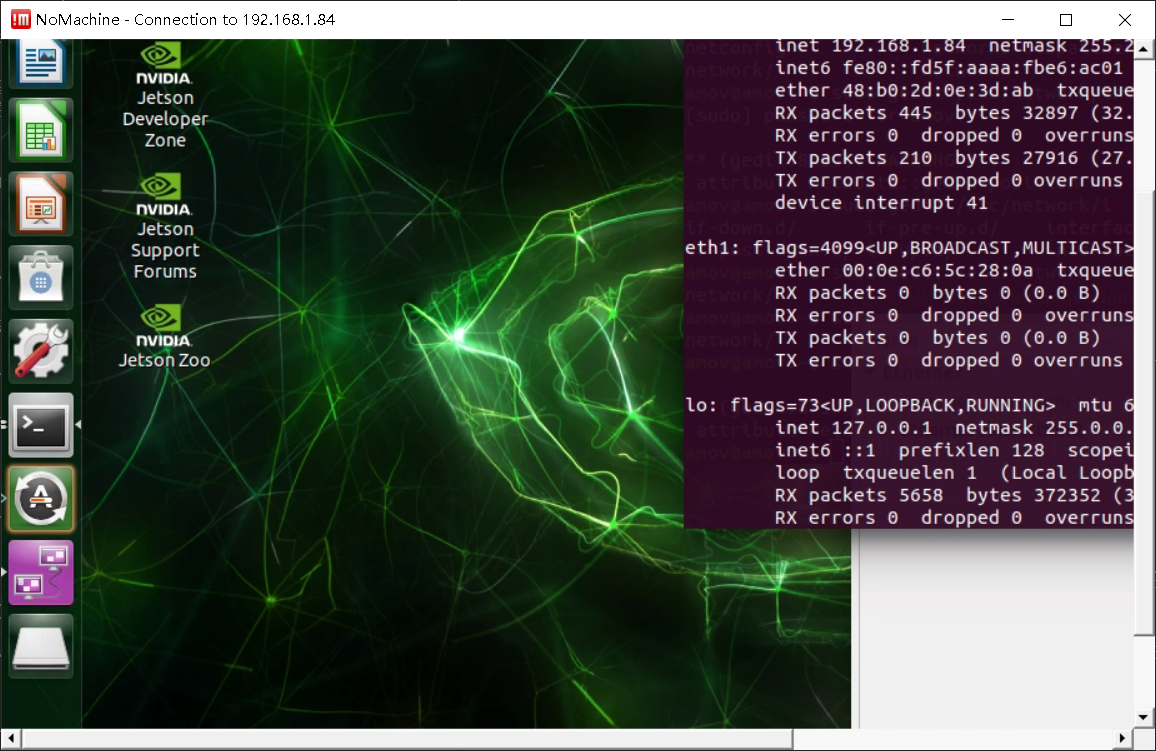
首先用4S电池,TX2供电线给TX2供电开机,插上HDMI到显示器上,无线键鼠插到tx2 USB接口上面。 开机之后输入密码,账户名和密码是一致的,比如账户是nvidia,那么密码也是nvidia。 登录进去连接到WiFi,确保nomachine软件是打开的(打开的话,在右上角会有显示nomachine的图标)。然后TX2 连接WiFi,接着查看TX2当前的IP地址,打开一个终端( Ctrl+Alt+t ),输入ifconfig,找到wanlx ( x,可 能为0,可能为1 ),可以看到inet addr:xxx.xxx.xxx.xxx,这些xxx表示的就是IP地址,比如我显示的 就是192.168.31.20。然后记住这个IP地址,HDMI线可以从tx2拔下来,无限键鼠可以拔掉,tx2两个 USB 口一个口接吊舱的视频 USB 口,另一个接吊舱的串口转 TTL 接口。
接下来,用自己的电脑,确保自己 电脑已经安装了nomachine软件,自己电脑WiFi也连接上和TX2一样的WiFi,打开nomachine,新建一 个连接,输入所要连接客户端的IP地址,我这里就是192.168.31.20。新建连接过程中保持默认参数。 新建完成后,双击刚新建的连接,提示是否要连接,选择连接。输入相应的账户名和密码,回车就可 以远程控制 tx2 了。
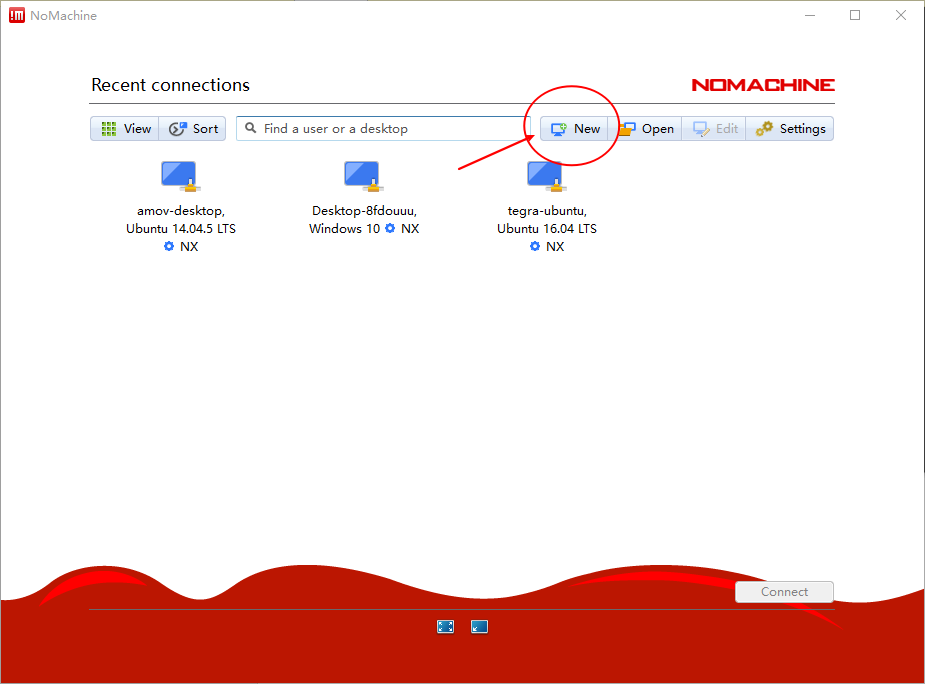
打开NOMACHINA软件,点击 New新建
Protrocol选择NX模式,然后输入TX2的IP地址192.168.1.84,Port默认4000

下一步,鉴定方式选择Password,下一步选择Do not use proxy,最后Done
如下选择刚才配置的参数,点击连接

成功后点击YES
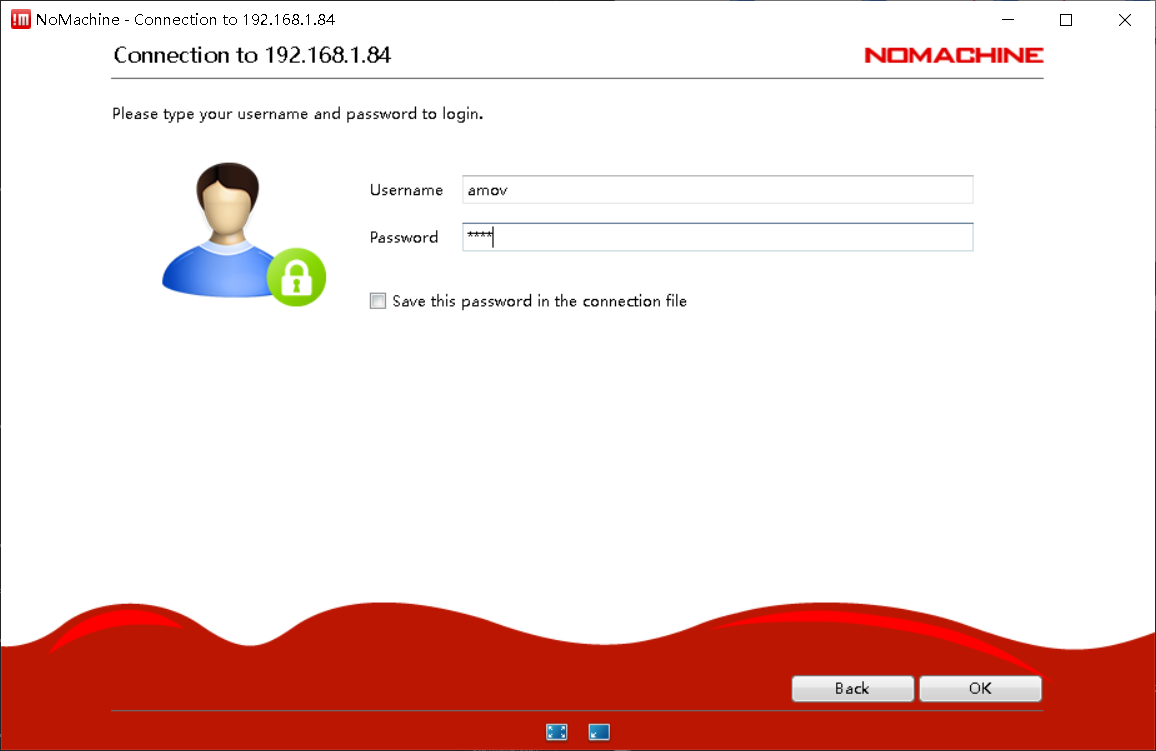
输入TX2的用户名以及密码(默认amov) 然后一路OK即可进行访问。

吊舱跟踪说明¶
吊舱的所有用到的源代码都在track_ws文件夹下面,分别是fv_tracking px4_command serial_ros,fv_tracking文件夹里面包含了吊舱的视觉框选实现,serial_ros该文件夹包含了视觉框选的结 那反馈到吊舱imu,并对吊舱进行相应的控制跟踪,px4_command该文件包含了由吊舱控制的运动, 已经视觉框选像素大小,对飞机进行相应的控制。(该吊舱的代码不建议和P200代码混用,如果要肯定 现P200的功能,请使用P200的代码包),吊舱的源码都在track_ws下面,确保要source track_ws该文 单的路径,可以在~/.bashrc查看是否source正确。
吊舱跟踪使用过程¶
编译源码
通过远程连接tx2进入到TX2中。打开一个终端输入ls /dev |grep ttyUSB该命令查看当前USB设备,如 那有ttyUSB0,那无需修改任何,如果是ttyUSB1,那么你需要修改 ~/track_ws/src/serial_ros/src/serial_node.cpp中找到ser.setPort这行,把这里串口改为 /dev/ttyUSB1。默认打开串口是ttyUSB0,如果你查看自己的USB设备是ttyUSB1,就需要在这里修改 一下。保存之后需要编译,编译需要到~/track_ws/目录下面,执行命令catkin_make。第二个查看自 己有没有视频设备,查看自己的/dev下面是否有/dev/videox ( x表示0或者1 ),如果/dev下面没 有/dev/videox相关的设备,请重新启动一下吊舱供电,重新查看/dev应该会有/dev/videox。x为0就是 默认,无需修改,如果x是1,那么需要修改~/track_ws/src/fv_tracking/nodes/web_cam.cpp。查找 cv::VideoCapture默认使用的是摄像头0,如果上面x为1,则这里摄像头选择也要改为1 .同理需要保存 和编译,编译还是需要在~/track_ws/目录下面执行catkin_make进行编译。
启动吊舱脚本
- 首先使用Nomachine连接TX2的远程桌面。
2. 接着运行如下目录的脚本文件: /home/amov/track_ws/src/px4_command/sh/sh_for_P200/fly_tracking_test.sh

- 会运行五个终端,依次检查每个终端是否有报错,这里第二个终端报错(打不开视频):
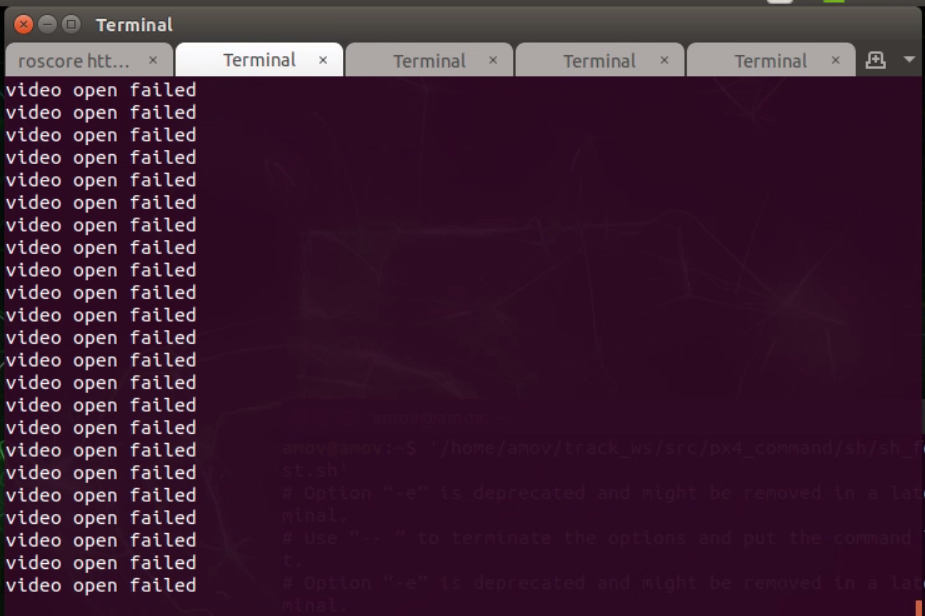
4. 请确保吊舱电源是否开启,并且吊舱的USB线插入TX2,通常在TX2上电后需要重启下吊舱,否者可能造成TX2连接不上吊舱, 插拔吊舱电源重新上电
- 再次运行脚本,运行成功:

- 框选一个物体,测试吊舱是否能够跟踪:
